 Gaultier Lecaillon
Gaultier LecaillonDo It Yourself
Whether you're a student, a maker or just curious, choose the kit that suits you and Build your Edog now !
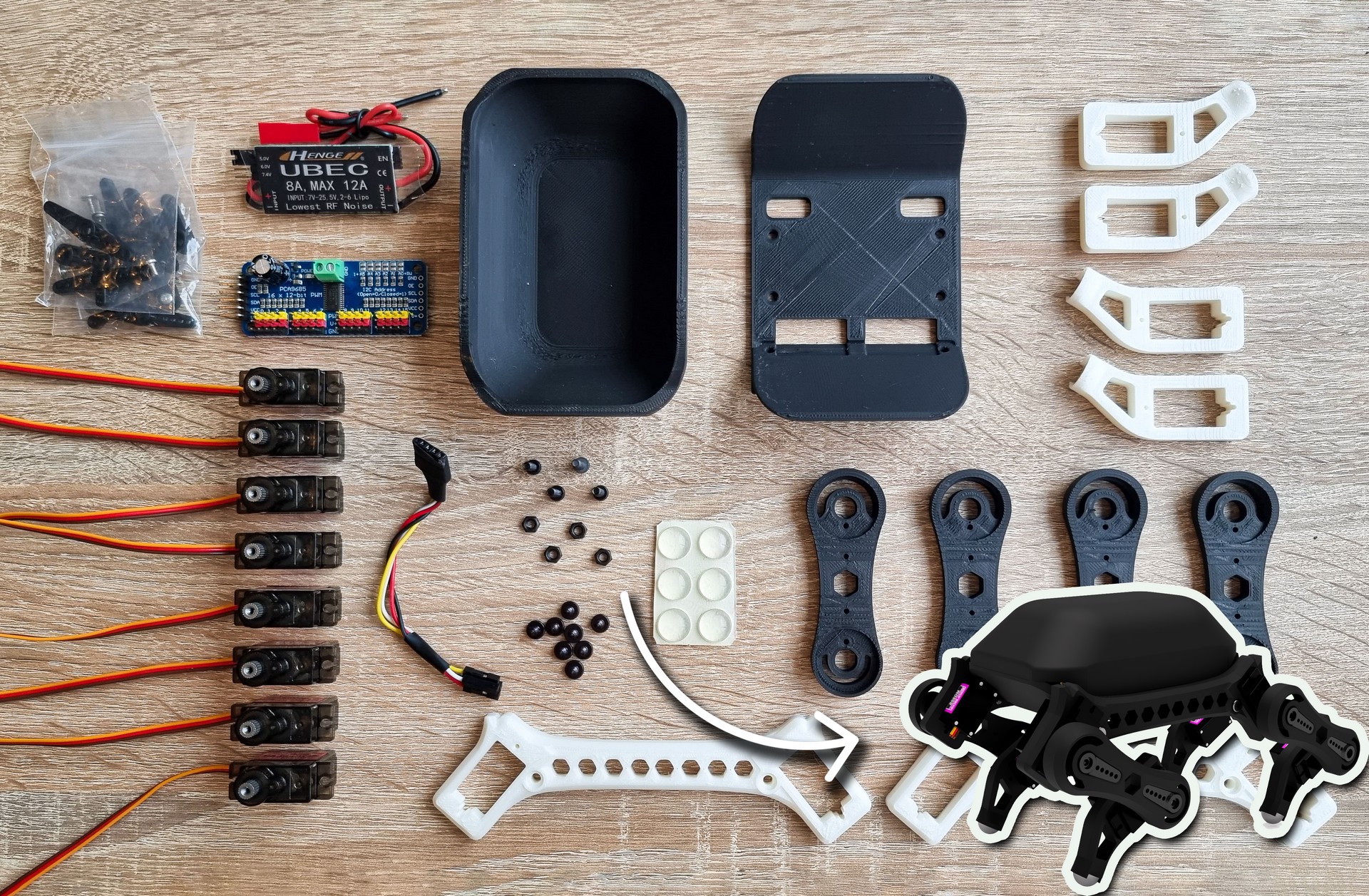
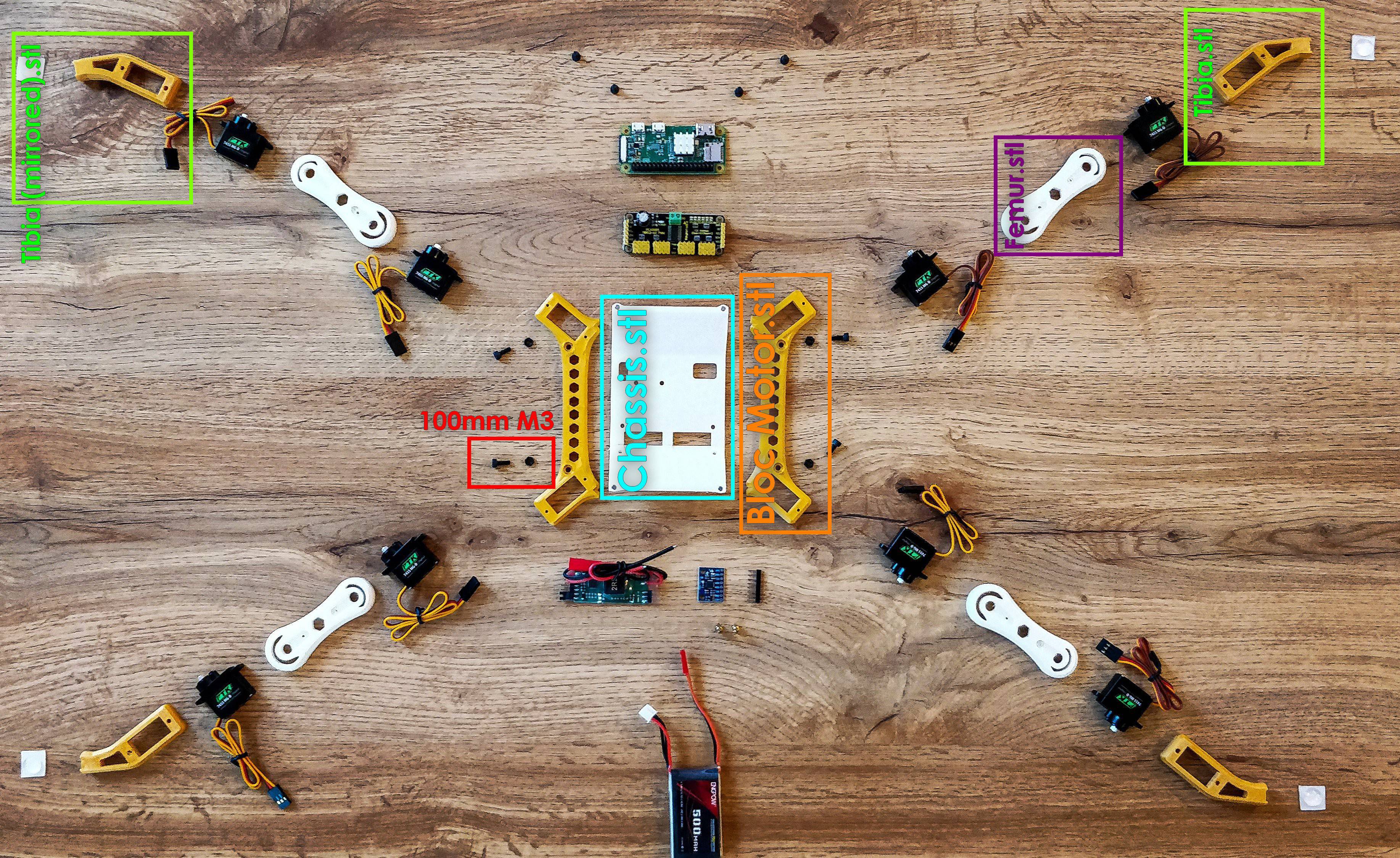
Fully 3D-printable Quadruped Robot that’s not only straightforward to assemble but also budget-friendly
Visite our shop: edog.io
Features:
- 100% 3D printable (without support)✔️
- Under 300gr weigh✔️
- Under 100$ budget ✔️
- Easy to build ✔️
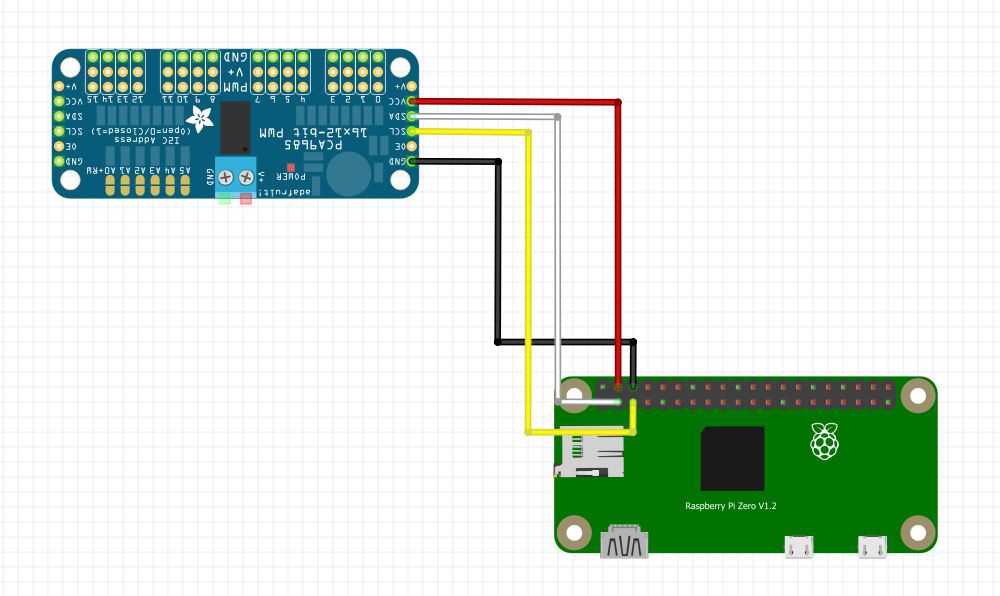
- Linux embedded (Raspberry Pi Zero)✔️
- Modular design / components ✔️
- Starter kit sell ✔️
Visite our shop: edog.io









 Coders Cafe
Coders Cafe
 Audrey Robinel
Audrey Robinel
 BINGOBRICKS
BINGOBRICKS
 Afreez Gan
Afreez Gan
Building this with a raspberry pi 4 instead!