 AdityaPrakash23
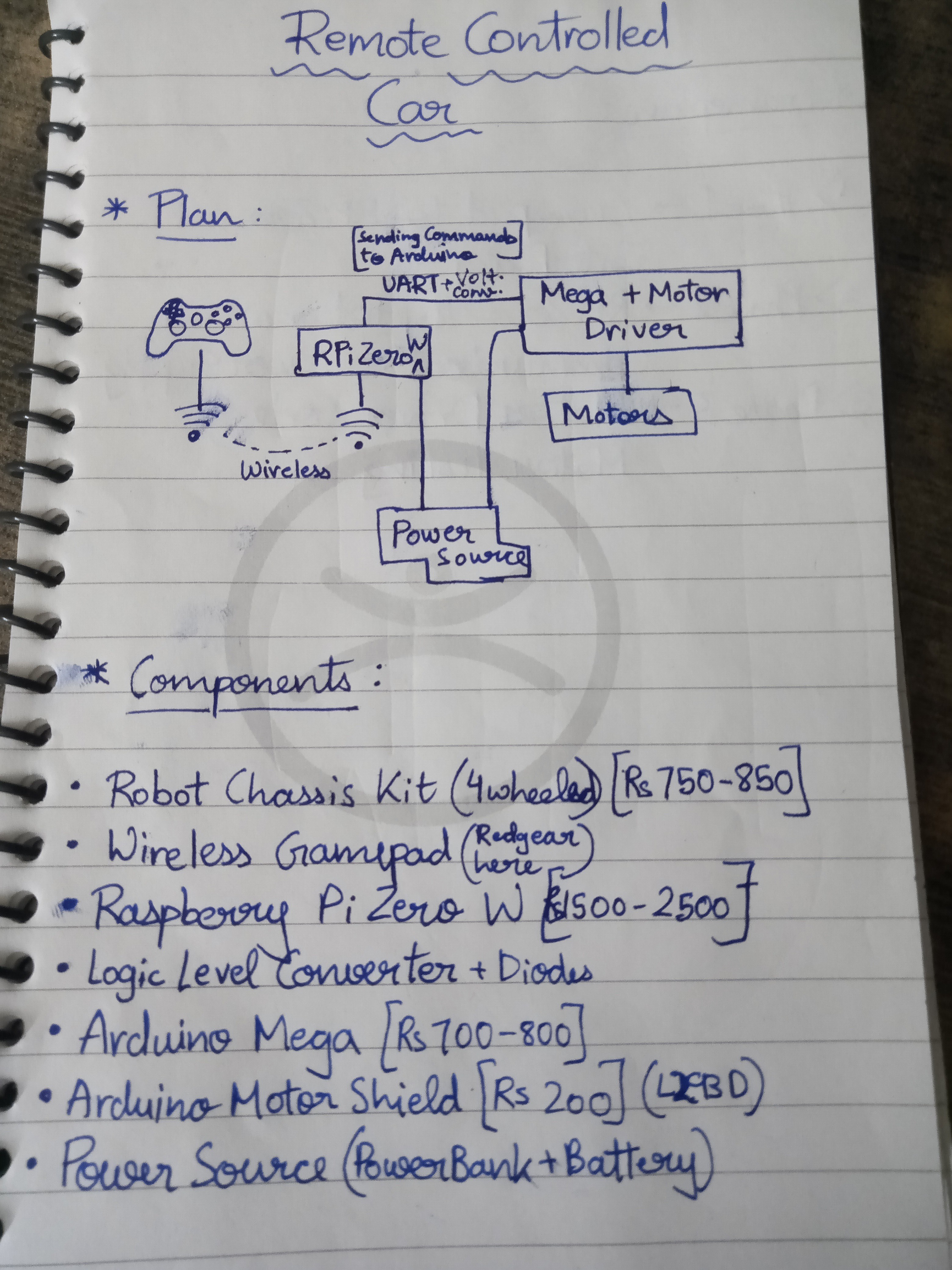
AdityaPrakash23Today, I planned out my gameplan and started with my 1st phase of the project. This is the (temporary) components list:
- 4 wheeled robot chassis kit
- wireless gamepad
- Raspberry Pi Zero W
- Logic Level Convertor
- Diodes
- Arduino Mega
- Arduino Motor Shield(v1)
- Power source
So for today's work, I revisited an old blog about interfacing gamepads with linux(raspbian) systems. This covers the workings really well and for today I only tried out the controller interfacing with my Raspberry Pi Zero. i am using a Redgear wireless controller with lots of inputs which give a lot of options for future additions.
Tomorrow I plan on building the python code for the movement commands and start with the phase 2 of my project.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.