0%
0%
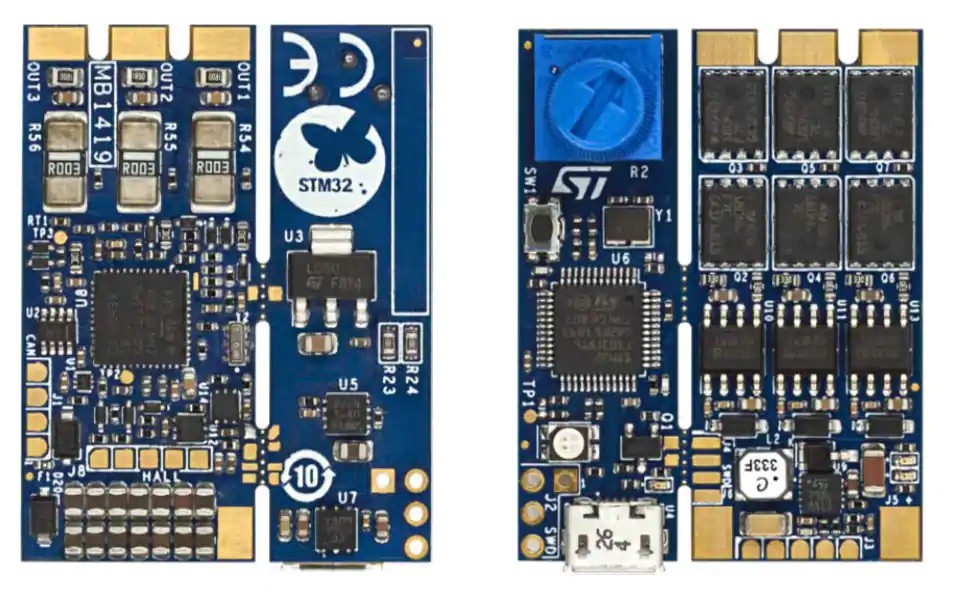
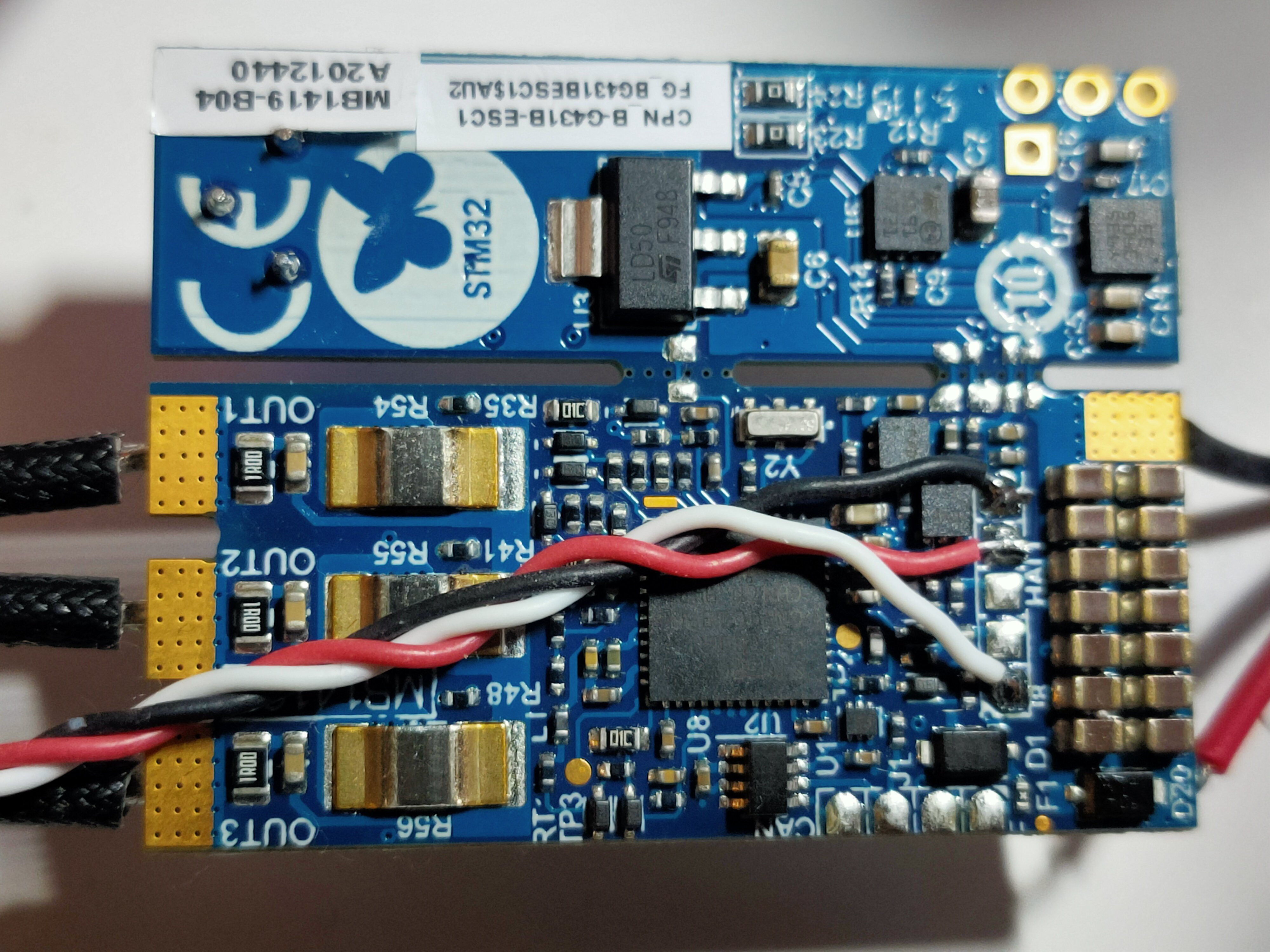
B-G431B-ESC Brushless Servo Controller
Ultra low-cost controller for brushless servo based on the B-G431B-ESC1 Discovery kit by ST
 pat92fr
pat92frBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests






 Dongil Choi
Dongil Choi
 Anthrobotics
Anthrobotics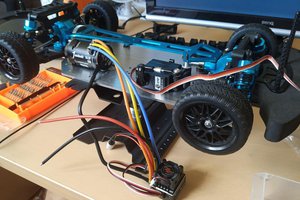
 Alexandr Kovalyonok
Alexandr Kovalyonok
 Paul Gould
Paul Gould
Hi Pat,
Are you still working on this? The code last update was 7 months ago. I just got this board and would like to make it work with AS5047P SPI encoder.