 E/S Pronk
E/S PronkThe prototype
The idea is simple: rotate a linear polarization filter in front of the lens and capture an image at 0, 45, 90 and 135 degrees. Then do some math wizardry to calculate the angle of polarization based on the difference in luminance between the 4 pictures. This is how it looks:
What is it good for?
There are a number of ways a polarimetric camera is useful in computer vision. It can remove reflections, detect stress in certain materials and detect scratches. For more information on what the industry is doing see this page.
I like it for the aesthetics mostly and I have another project where I used one as a microscope.


 Paul Gould
Paul Gould
 Henryk Plötz
Henryk Plötz
 Jeremy g.
Jeremy g.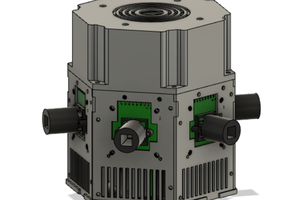
 Monstrofil
Monstrofil
fantastic! It's like getting a 'normal map' of reality! I wonder if an algorithm could predict depth data from this