 Ricochetrj
Ricochetrj
Matrices Denavit-Hartenberg (DH)
Las matrices DH son matrices que describen la relacion entre los eslabones de una cadena ciematica y describen la forma del robot de forma numerica, utilizando los angulos y las distancias en los ejes z y x de cada uno de los eslabones para pasar de una junta a la siguiente junta. Estas matrices son importantes ya que de alguna manera codifican la estructura del robot/manipulador y la relacione entre eslabones y juntas. Estas matrices son la clave para poder codificar tanto la cinematica directa como la inversa de cualquier robot. El procedimiento para generar las matrices es relativamente sencillo
- Se comienza en la primera junta, y se define el sistema de coordenadas en la junta, con el eje z perpendicular a la junta y el eje x paralelo a la misma
- Se denota la distancia que se debe desplazar verticalemente (eje z) de la primera junta a la siguiente como d1
- Se denota la distancia que se debe desplazar horizontalmente de la primera junta a la siguiente como a1
- Se denota la rotacion que se debe de hacer en el eje z para coicidir con el marco de referencia de la siguiente junta como theta1
- Se denota la rotacion que se debe de hacer en el eje z para coicidir con el marco de referencia de la siguiente junta como alfa1
- Se hace el mismo proceso de pasar de una junta a la siguiente hasta agotarse la juntas.
Con lo que se obtiene una matriz como esta:
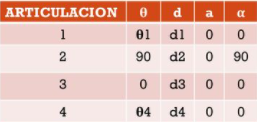
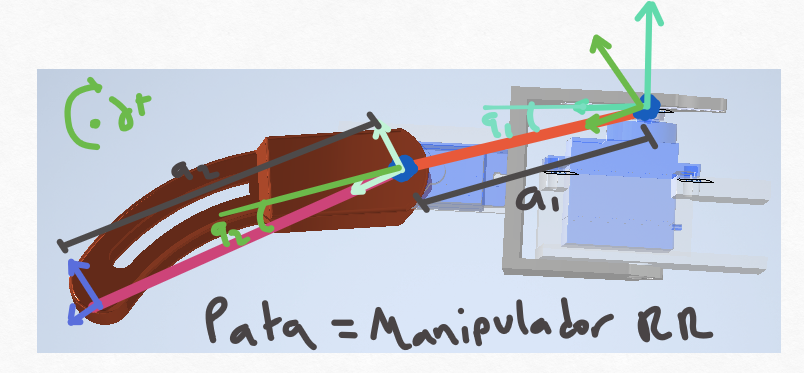
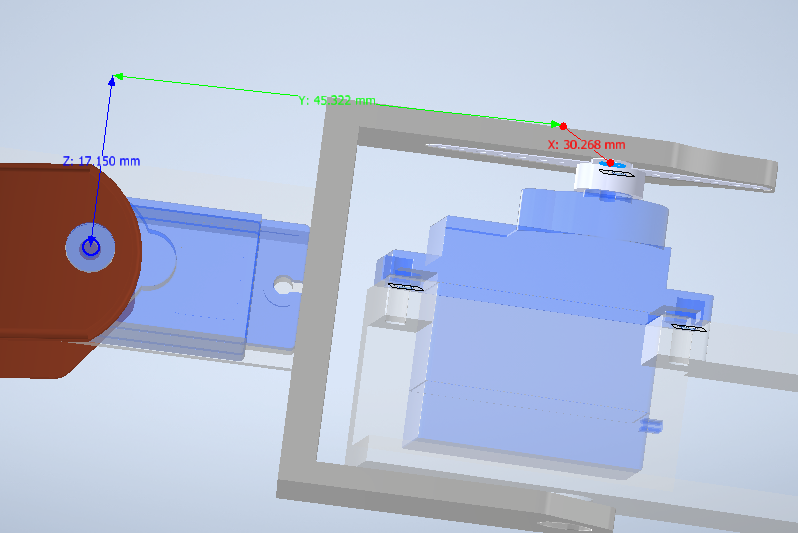
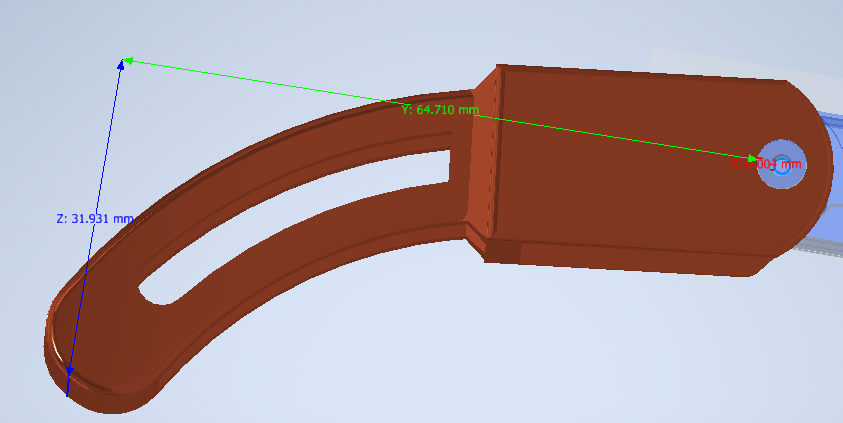
En el caso de nuestro hexapodo con 2 grados de libertad, se tienen solo dos articulaciones. En este caso nuestra matriz DH seria una matriz 4x2. Basandonos en la siguiente representacion para la pata y las siguientes medidas obtenemos:
Nuestra tabla DH seria entonces:
| d | a | ||
| q1 | 1.72 cm | 4.53cm | 90 |
| q2 | 0 | 6.47cm | 0 |
Utilizando las siguientes eqcuaiones:
Podemos encontrar nuestra matrix DH como una multiplicacion de A1*A2
Con esto en mente utilizamos el siguiente codigo para encontrar la matriz DH de nuestra pata de dos eslabones

Lo cual nos da que nuestra matriz DH es:

Transformaciones de Base
Las transformaciones de base sirven para ubicar cada pata segun su ubicacion relativa a origen global del sistema. En este caso el origen global del sistema es centro del hexapod, donde se encuentra el arduino nano. Para este caso y dado que las patas tienen la misma forma, se puede utilizar la misma matriz DH para cada pata.Solo se necesita trasladar cada pata a su ubicacion en el hexapod, y luego rotarla en el eje z para que coincida con como esta orientada.
Procedemos a definir las transformaciones base de cada pierna de la siguiente manera, como simples rotaciones sobre el eje Z y desplazamientos en X y Y:
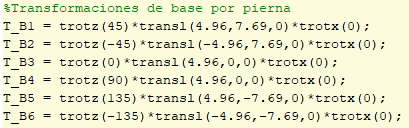
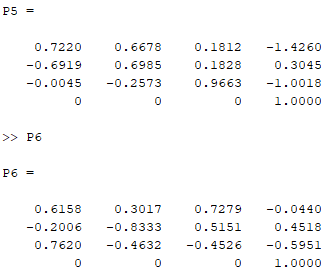
Entonces podemos encontrar que nuestra matriz DH de cada pierna es tan solo la multiplicacion de la matriz DH general x La Transformacion Base. Esto nos da para cada pierna (cuando el angulo q1=0 y q2=0):


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.