 Ricochetrj
RicochetrjEsquematico:
Para el desarollo de una placa de circuitos impresa, necesitamos disenar el circuito con el que opera el control del robot hexapodo. Para lograr esto, realizamos dos propuestas de esquematicos. El primer esqumatico es en el que no se toma en cuenta la posibilidad de obtener el Arduino Nano como un Breakout Board. Para este primer esqumatico, tomamos en cuenta todas las partes que necesitariamos para poder hacer funcionar el microcontrolador ATMEGA328PB-AU (el 'corazon' del Arduino Nano) con toda la misma funcionalidad que proporciona el Breakout Board ademas de todas las conecciones a los diferentes actuadores (12) de nuestro hexapodo. Con esto en mente, y usando el listado de partes del Arduino Nano, obtenemos el siguiente esquematico:
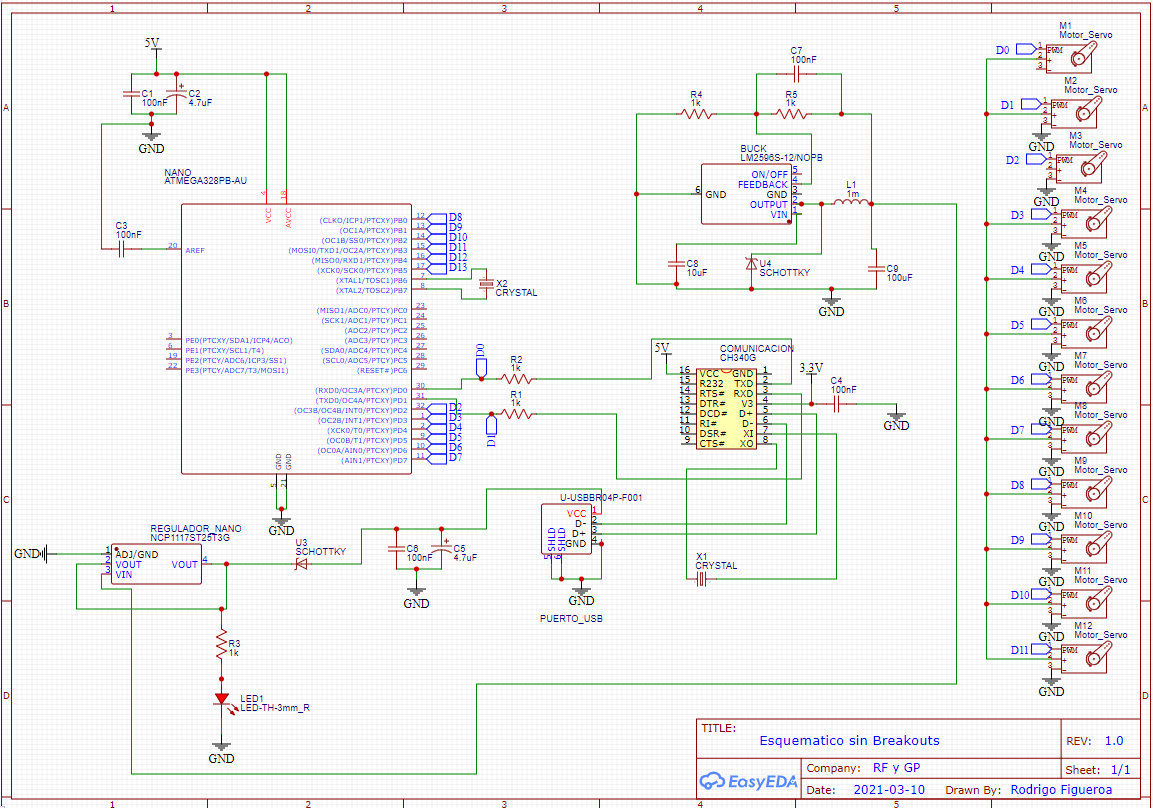
En este esquematico se pueden apreciar las diferentes partes que hacen funcionar el arduino nano. Desde los conectores del USB, hasta el mando de comunicacion Serial/I2C/SPI. Tambien el regulador de voltaje y el crystal oscilador responsable por hacer funcionar al microcontrolador. Finalmente se pude apreciar tambien los diferentes pines que usariamos para conectar a todos los servo-motores.
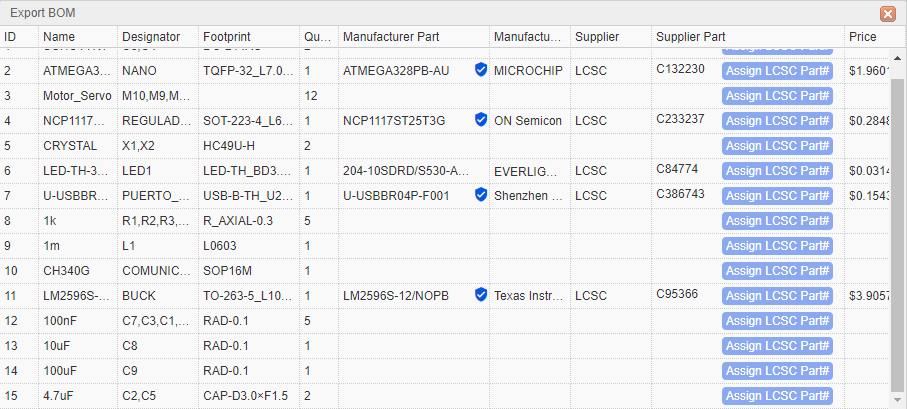
Para esta version del esquematico el listado de partes resultante seria el siguiente:
Para el segundo esquematico, dado que podemos asumir que la gran mayoria de componentes vienen dentro del breakout del Arduino Nano, obtenemos lo siguiente:

En ese caso se puede ver que lo unico que tenemos conectado al arduino Nano son Headers donde conectariamos la alimentacion y la senal de control de los 12 servos. Asi tambien como los dos reguladores de voltaje que permitiriaan alimentar los servos y el arduino Nano. Desde un punto de vista pragmatico, el segundo esquematico simula de mejor manera lo que hariamos para conseguir las partes que necesitamos. Por ende, dado que el tamano de la placa y la diferencia en costo entre adquirir cada componente de manera individual vs comprar el arduino Nano completo es despreciable, la fabricacion de la placa se haria usando este segundo esqumatico.
PCB
Habiendo decidido el esqumatico que se iba a utilizar y la disposicion de los componentes, basandonos en que el tamano de una hoja de cobre grande promedio es de 12.5 cm x 10 cm, se obtiene el siguiente diseno de PCB:

En este diseno se aprecia de mejoe manera la escala de los componentes, asi tambien como la posicion final de los mismos. Podemos ver que dado que nuestras conecciones son relativamente simples, la placa puede fabricarse de un solo lado, lo que agiliza y facilita la fabricacion de la misma. Lo unico que quedaria pendiente para esta placa, serian los agujeros para el medio de sugecion de nuestra eleccion. Quisieramos hacer unas pruebas preliminares primero antes de decidir la posicion de los agujeros. Tambien hay que tomar en consideracion que el diseno de esta placa no es final, dado que tenemos que hacer pruebas para revisar que no hayan problemas de potencia en lo que son las senales de control a la hora de controlar los 12 servos. Esto debido a que en nuestro Power Budget trabajamos con versiones muy idealizadas del consumo de potencia y no tomamos en cuenta cosas como la degradacionde una senal PWM.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.