 Ricochetrj
Ricochetrj*Todo el Modelado en 3D y los planos se Realizaron en Autodesk Inventor 2020
Concepto inicial del Hexapodo:
Habiendo establecido que desabamos hacer un hexapodo basado en un insecto palo, procedimos a buscar cosas que se hayan hecho antes que nos podrian servir como inspiracion. Luego de una busqueda relativamente corta, encontramos un hexapodo comercial llamado:
PhantomX AX Metal Hexapod- Por INTERBOTIX

Link Para visitar la Pagina: Phantom X por INTERBOTIX
Este robot hexapodo cuenta con 3 grados de libertad, y esta hecho completamente de una aleacion de aluminio. El equipo de Trossen Robotics diseno tambien todo el sistema de control (el cual se incluye en el kit). Este robot comercial se encuentra disponible por el 'modico' precio de $1896 por todo el kit. Vale la pena considerar que la combinacion de los 18 servos 'AX-18A' y las piezas pulidas de alumnio no son componentes baratos. Tambien este hexapodo se vende como una herramienta educativa, que permite el desarollo de software y algorimos para su control manual o automatico. Tambien el robot cuenta con una camara que despliega feed en ' real-time'. Fuera de ser muy completo, los movimientos y la versitilidad del mismo lo hacen uno de los mejores hexapodos de su tipo en el mercado.
Basandonos en el PhantomX decidimos hacer un robot que tuviera una geometria similar, pero que requriera menos servos. Decidimos entonces reducir el numero de GDL del robot de 3 a 2, en donde perdemos la flexibilidad de las 'rodillas' que permiten ajustar con mayor precision la posicion vertical de las piernas. Estabamos dispuestos a hacer ese sacrificio sabiendo que nuestro diseno debia de cumplir un proposito basal. Sabiendo que nuestro diseno no tiene requerimientos de escalar terrenos escarpados y que se va a encontrar en condiciones controladas, queriamos hacer un diseno que fuera no solo modular, sino que tambien costo eficiente. Con esto en mente procedimos a modelar en 3D nuestro concepto inicial apra el hexapodo y obtuvimos lo siguiente:
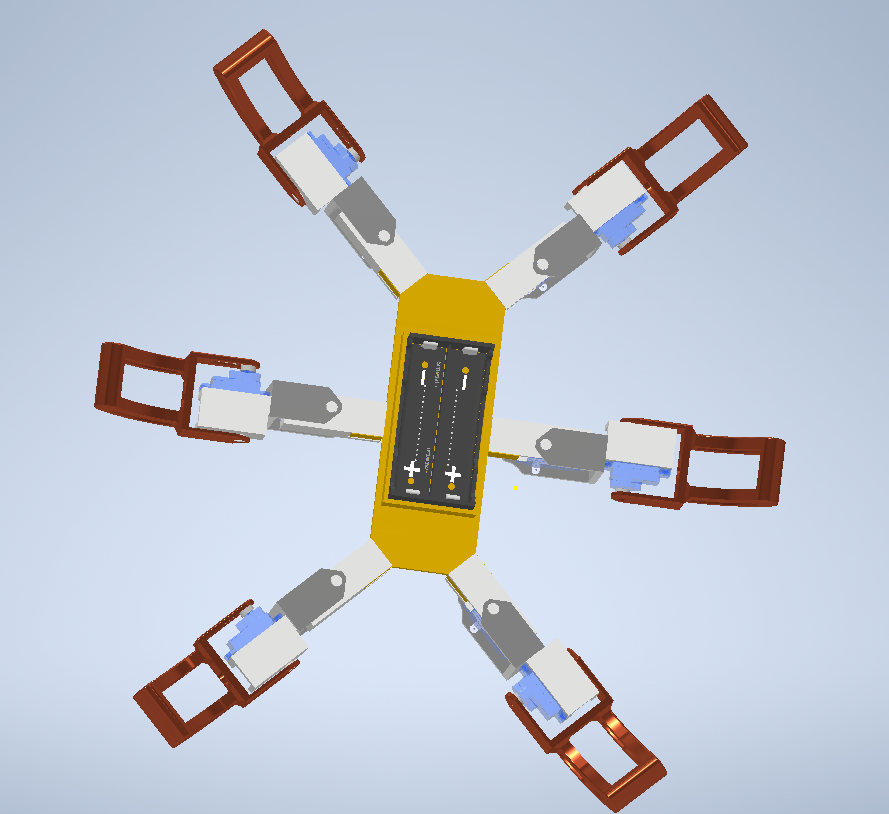
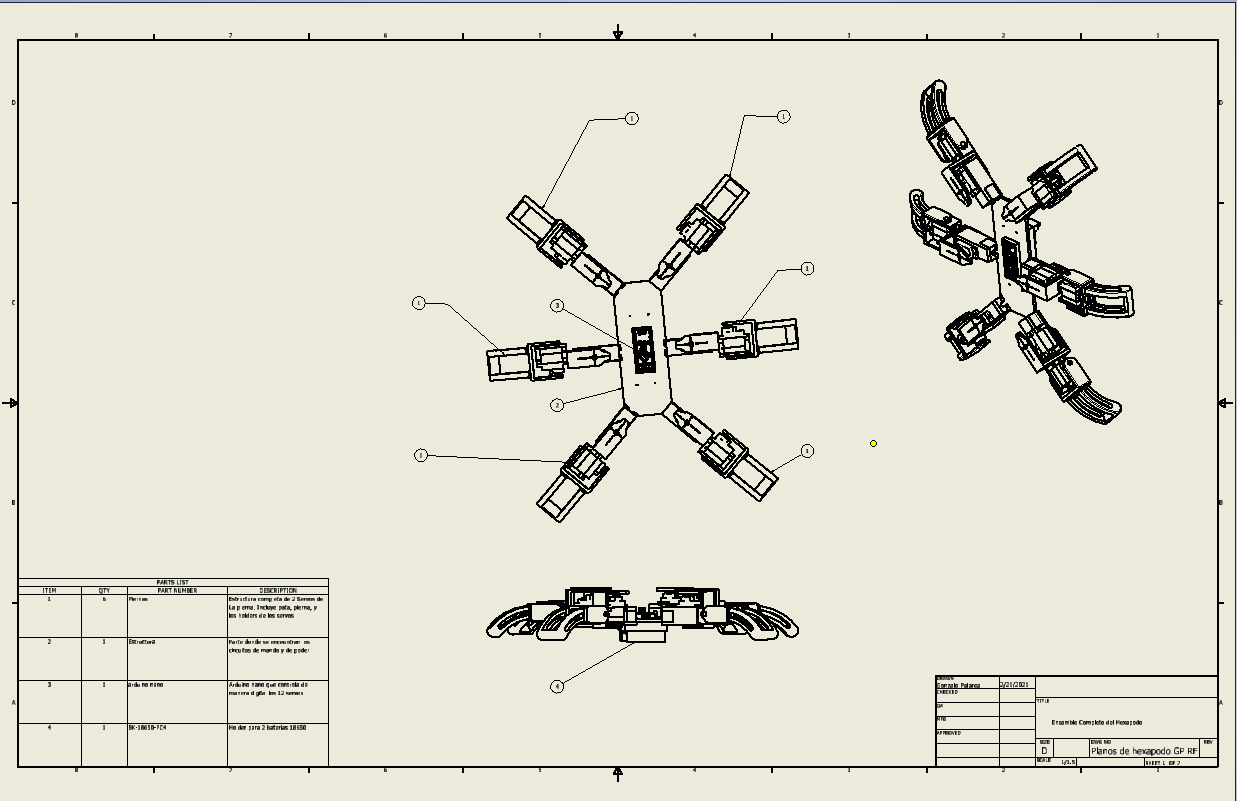
Tenemos la vista superior del ensamble:
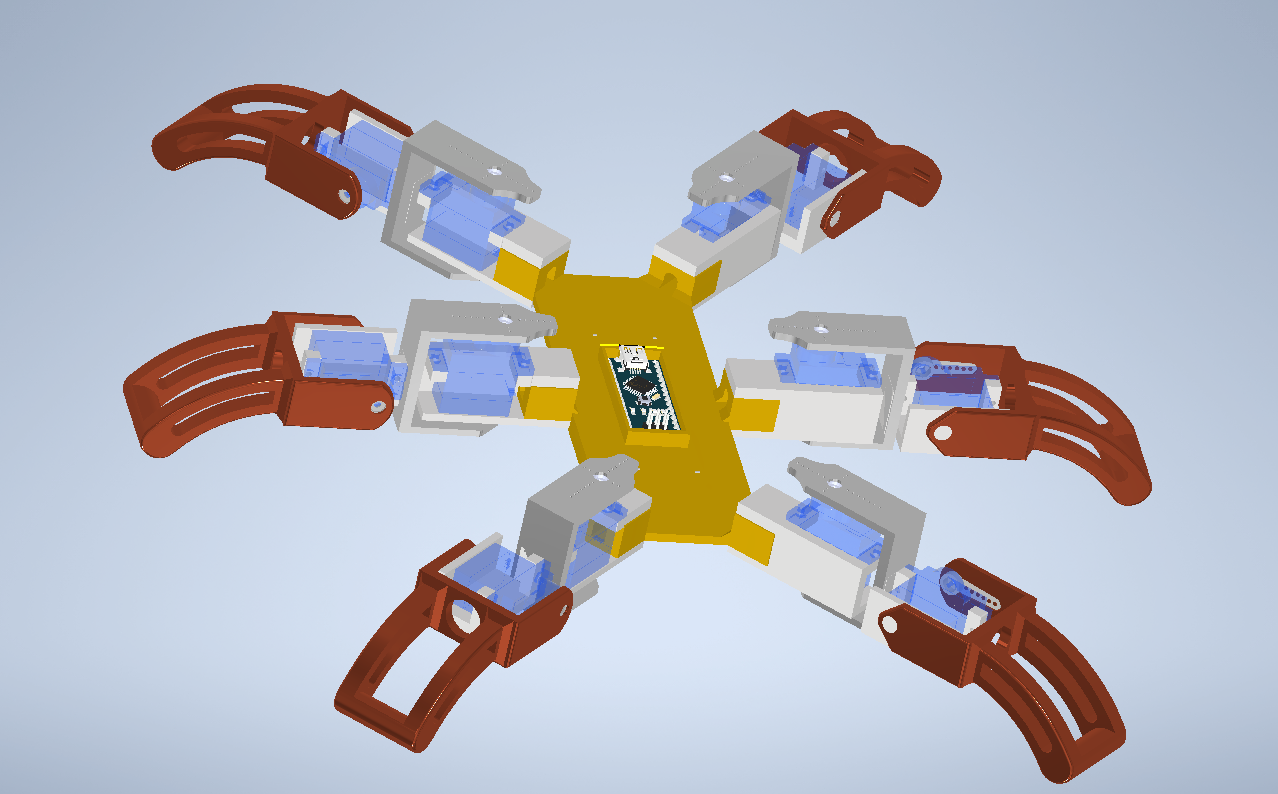
Luego tenemos la vista posterior:
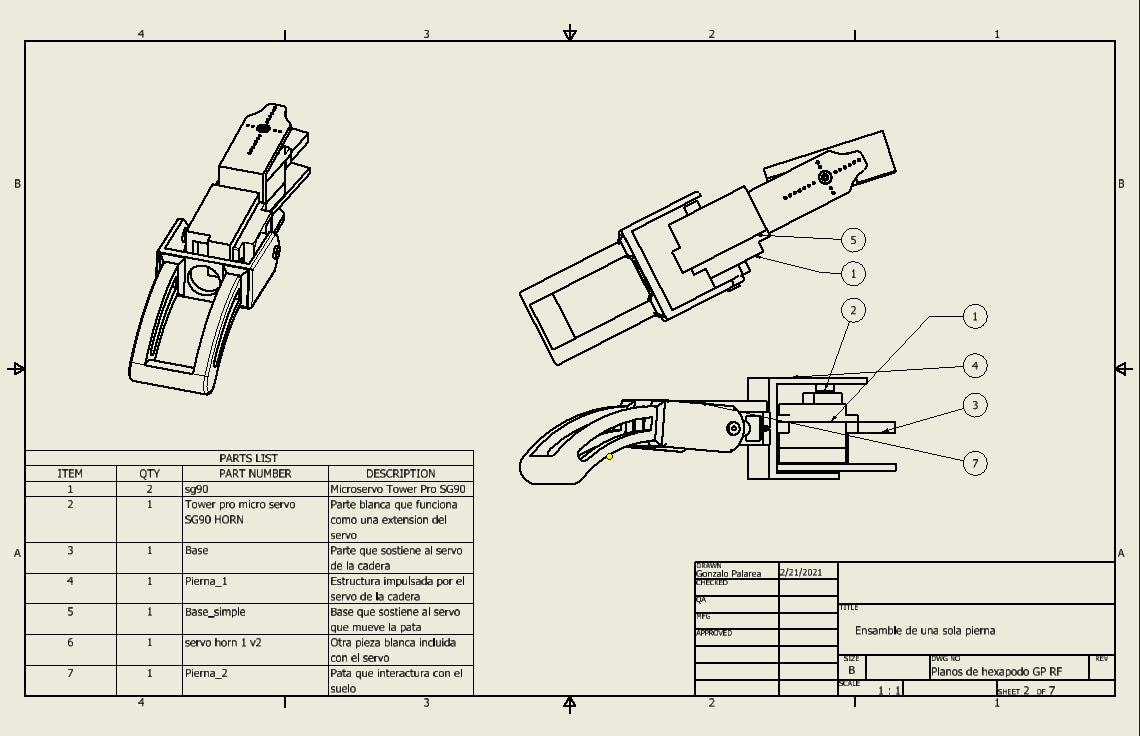
Listado de Piezas:
De las piezas que vamos a fabricar nosotros, tenemos el siguiente listado:
| Pieza | Total | Descripcion |
| Base de Control | 1 | Parte central del hexapodo donde se encuentra el centro del mismo. Es donde se alamacenan los sistemas de control y potencia. Tambien es a donde van conectadas todas las patas. |
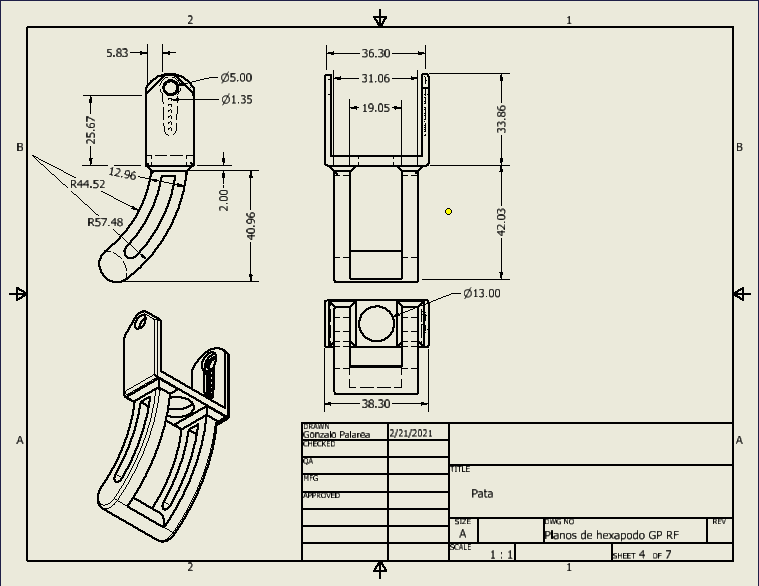
| Pata | 6 | Parte del hexapodo que interactua con el suelo. Es la parte en cada una de las pierna que impulsa al hexapodo hacia adelante. Rota con el segundo actuador |
| Base Pierna | 6 | Parte del Hexapodo que se mueve con el primer servo. controla el movimiento perpendicular de las piernas con el uso del primer actuador |
| Holder de Servo 2 | 6 | Base que sostiene al primer actuador y lo conecta con la parte 'base pierna' |
| Holder de Servo 1 | 6 | Base que sostiene al segundo actuador y lo conecta con la pierna y la pata |
Listado de Elementos que se van a adquirir por aparte:
De las piezas que vamos a adquirar por aparte, tenemos el siguiente listado:
| Pieza | Total | Descripcion |
| Arduino Nano | 1 | Microcontrolador que va a ejecutar el algoritmo de control para las 6 patas y 12 actuadores |
| Baterias 18650 | 2 | Baterias de alto amperaje que van a entregar poder al microcontrolador y a los actuadores |
| Baterry holder for 18650 | 1 | Un holder para dos baterias 18650 |
| Micro-Servo S90 | 12 | Servos que van a servir como actuadores de nuestro sistema y van a permitir el movimiento del mismo |
Planos de Manufactura:
De las piezas que vamos a fabricar ser tienen los siguientes juegos de planos:
Base de Control :

Pata:
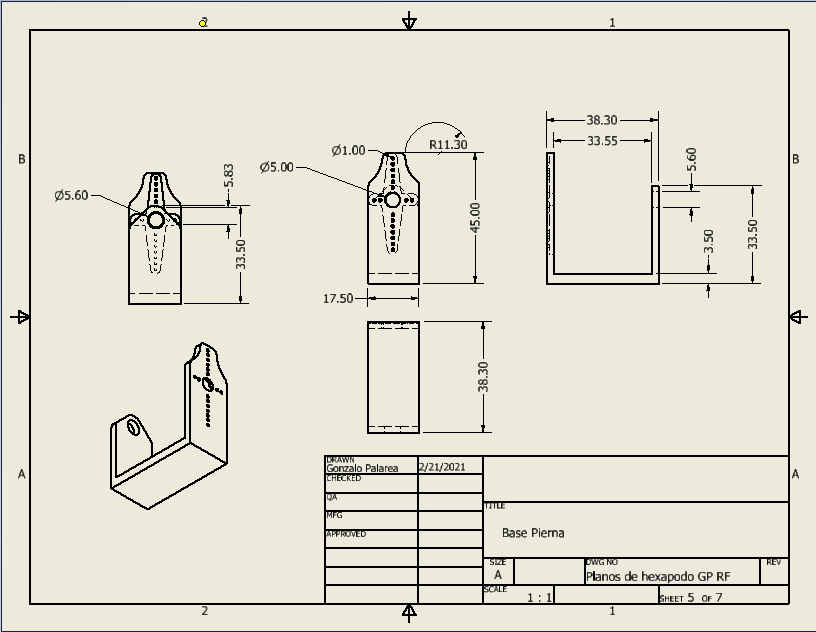
Base Pierna:
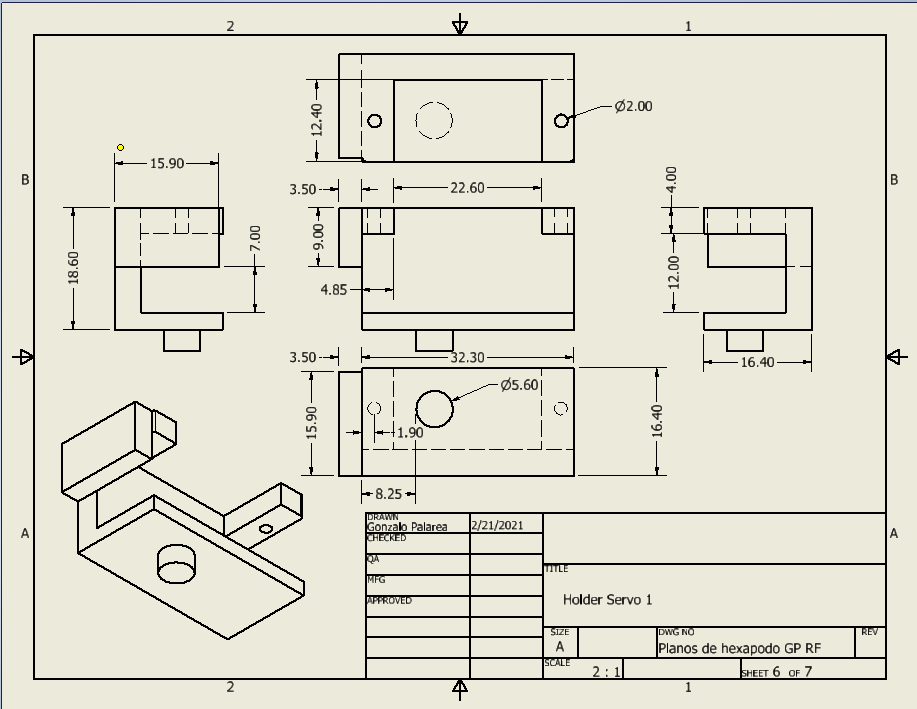
Holder Servo 1:
Holder Servo 2:

Apartir de estos juegos de planos podemos generar el juego de planos de dos ensambles
Ensable de una sola pierna:
Ensamble de todo el Hexapodo:
Seleccion de Materiales y Proceso de Manufactura:
Debido a las herramientas que tenemos a nuestra disposicion en un tiempo de recursos limitados, decidimos fabricar todas las estructuras fisicas del hexapodo utilizando impresion en 3D. Luego de considerar los diferentes tipos de materiales que exsisten para esta tecnica de fabricacion, decidimos fabricar nuestras partes de 2 plasticos:
- PLA+: Polylactic Acid, donde el '+' indica aditivos que mejoran las propiedades mecanicas
- PET: Polyethylene terephthalate
En donde fabricariamos la base y las partes que sostienen los actuadores de PLA+ y solo las patas de PET. Las patas las fabricariamos de PET dado a que tiene mejores propiedades mecanicas que el PLA+ y porque esperamos que las patas sean las parts donde esperamos la mayor cantidad de desgaste. Tambien el PET tiene mayor rugosidad superficial, por lo qeu se obtiene mayor traccion. Aparte de eso necesitariamos un total de 24 tornillos M3x2 que fijan los servos a sus bases y posibles pegamentos para fijar el holder de baterias a su base al igual que el Arduino Nano.
*Todos los archivos para las partes (los archivos .ipt, .iam, .idw y stl.) se encuentran en el projecto
*Todas las medidas estan en mm
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.