 PabloCastillo17348
PabloCastillo17348Como paso final para la implementación del robot cuadrúpedo se generaron las trayectorias por medio del entorno Webots, entorno de código abierto para simular robots móviles. Se eligió este, en vez de MATLAB debido a que se reconoció que contaba con movimientos mayormente suaves para el desplazamiento del robot. De esta manera se reduce el golpeteo de las patas dentro del movimiento del cuadrúpedo. Tomando en cuenta esto, se seleccionó el gait (patrón de movimiento) a utilizar para el mismo, este se muestra en la siguiente figura:
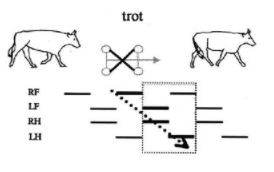
Se seleccionó el gait de trote debido a que el movimiento cruzado genera un mejor desplazamiento para el robot diseñado. El movimiento de las patas en forma de cruz proporciona mayor estabilidad para el modelo respectivo. Cabe mencionar, que en la mayoría de los demás gait, el robot no alcanzaba la estabilización deseada o presentaba dificultades en el tiempo de simulación.
Para la generación de trayectorias, se utilizaron parámetros necesarios para garantizar la altura adecuada y el movimiento de avance respectivo para que las patas no generaran ningún impacto entre ellas. Estos parámetros son:
- Altura:
Avance sin colisión:
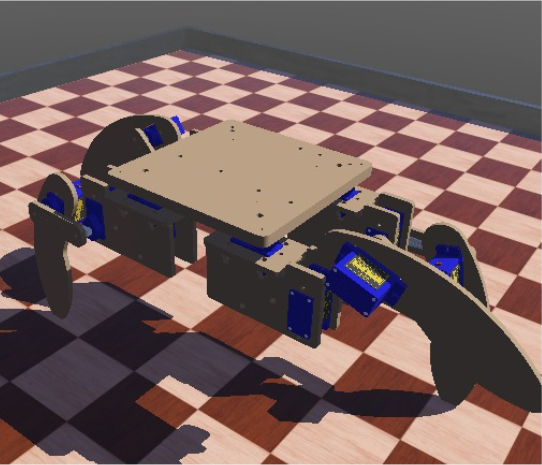
Con esto se asegura el movimiento del robot. En la siguiente imagen se muestra el robot dentro del entorno seleccionado:
Para el giro del cuadrúpedo, dentro de una misma trayectoria, se optó por realizar el movimiento de dos de las cuatro patas del mismo lado. Esto para asegurar la estabilidad del robot y de esta forma asegurar que este se mantenga sobre el plano seleccionado sin volcarse.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.