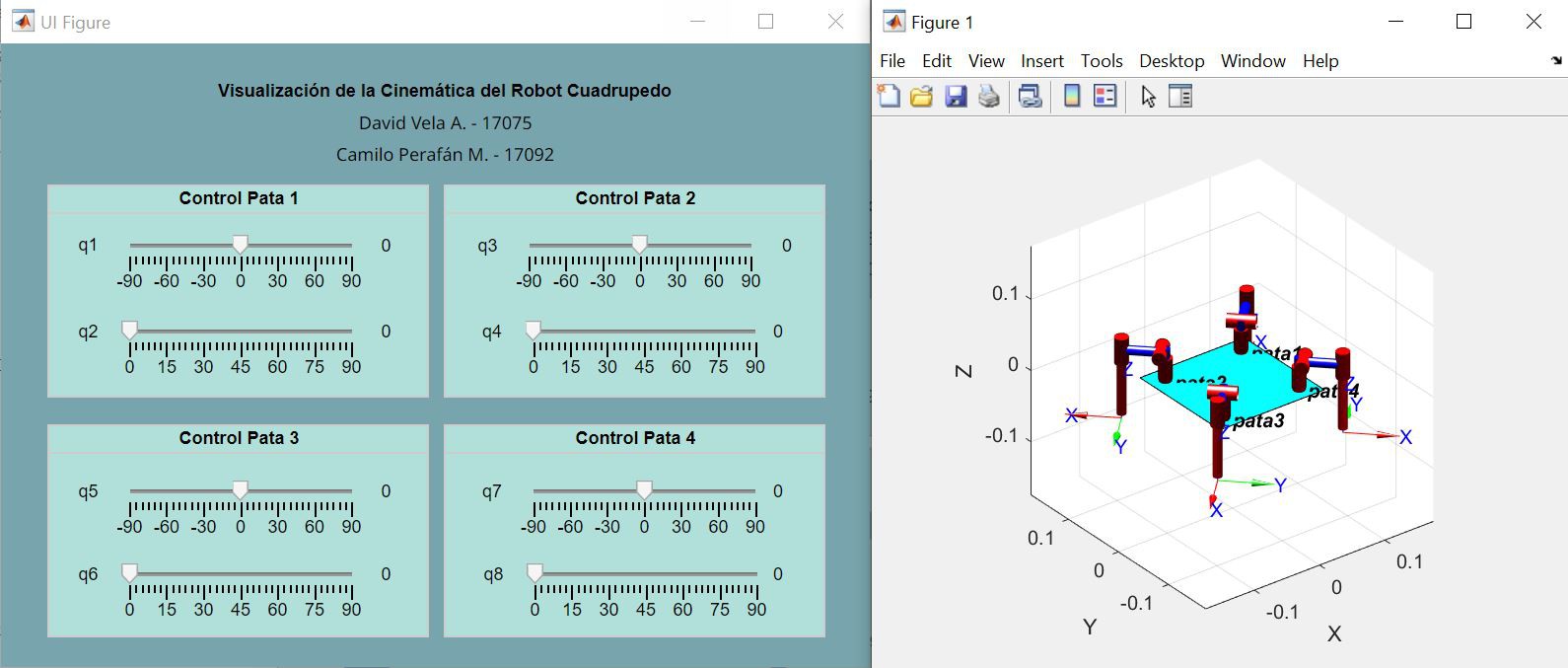
Para esta sección se desarrolló una interfaz gráfica de usuario en MATLAB, haciendo uso de la herramienta de App Designer. En esta interfaz, el usuario, a través de sliders, podría modificar los parámetros q1 y q2 de cada pata y ver este cambio reflejado en otra pantalla, la cual presenta un diagrama del robot. Esto se consiguió por medio del uso de la Robotics Toolbox de Peter Corke, en la cual se usaron principalmente su función SerialLink y su función plot(). Cabe resaltar que se restringieron los valores que podían tomar los sliders de q1 y q2 a un rango de -90° a 90° y de 0° a 90°, respectivamente. Esta GUI se encuentra en la carpeta Cuadrupedo_17075_17092.rar en la sección de Archivos, bajo el nombre de Simulacion_Cuadrupedo_17075_17092.mlappinstall, y una foto ejemplo de la GUI diseñada se presenta a continuación:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.