 vel17075
vel17075Para este proyecto se utilizarán los servo motores Micro Servo SG90 1.6kg de torque. Estos motores pueden proveer un torque máximo de 1.6 kg-cm. Para esperar una operación suave de los motores en la aplicación, el torque que soporten debe estar entre 1/5 y 1/3 de la carga máxima. Este rango es de 0.32 a 0.53 kg-cm. Para encontrar el torque del motor, se requieren los valores de cargas y el radio entre ellos y el eje del motor; esto empleando la expresión:
Donde tau es el torque, F es la carga y r es el radio perpendicular entre la fuerza y el pivote.
Los motores que soportarán mayor torque son los de las articulaciones de las cuatro paras (los que rotan en el eje horizontal), ya que, además de tener como carga su propio peso, se tiene la reacción del suelo con la pata, la cuál se relaciona con el peso total de la base del robot. Por ello, se utilizó el software de Autodesk Inventor para encontrar el centro de masa del robot; esto con el objetivo de encontrar el radio del torque que la pata genera.
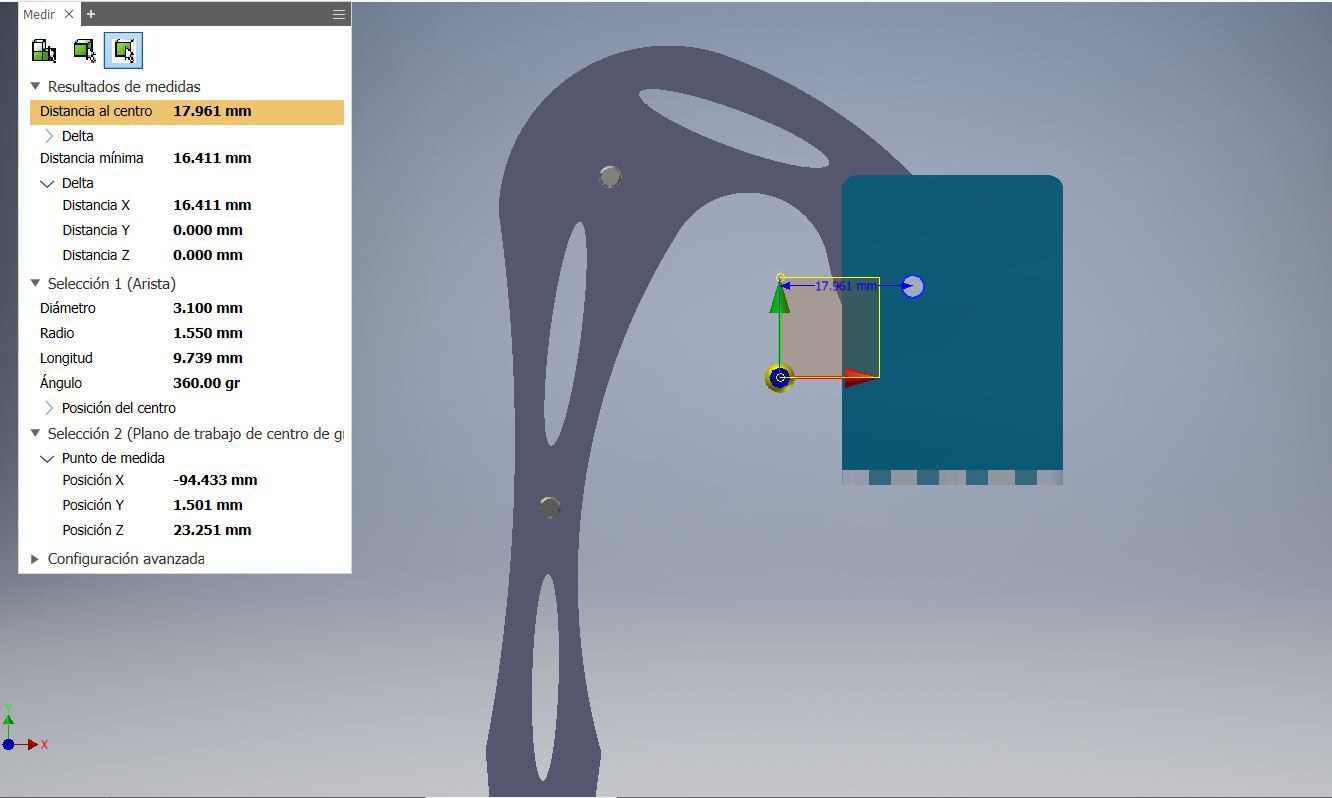
Con la imagen anterior, se encuentra el radio de torque del centro de masa, el cuál es de 1.64 cm. Una pata pesa, con todo y motor, 0.038 kilogramos. Con esto se puede encontrar el torque que genera el propio peso de la pata en el motor, la cual es de 0.062 kg-cm.
Ahora se mide la distancia entre el punto de contacto de la pata con el suelo, ya que es en ese lugar donde se genera la fuerza de apoyo.
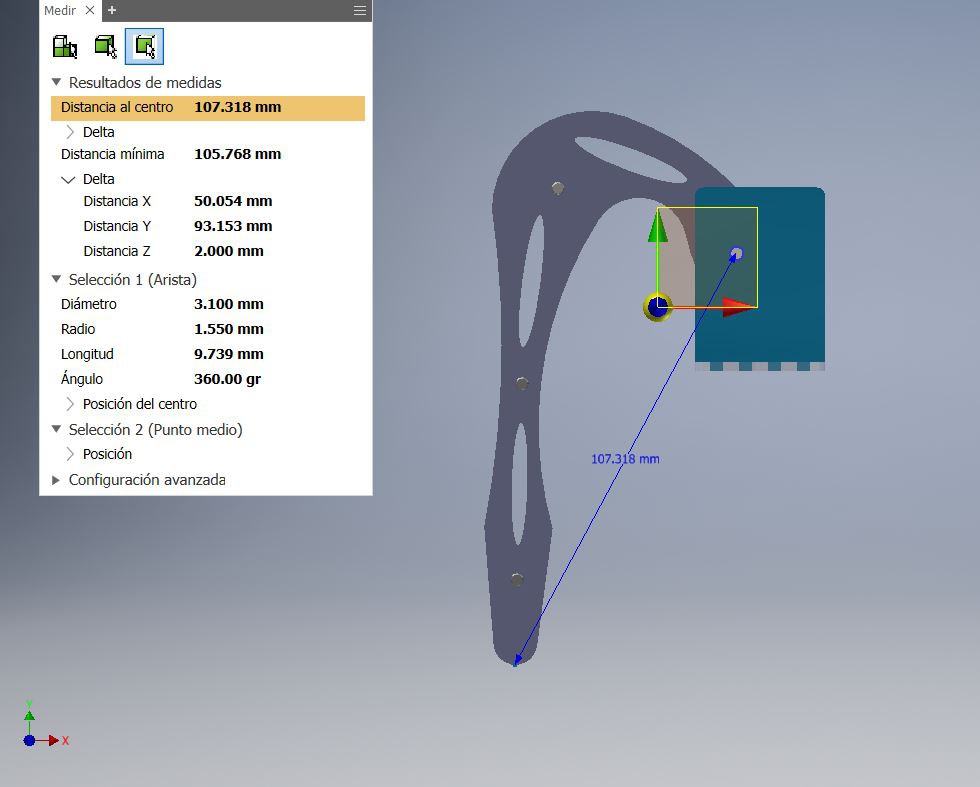
Este radio es de 5.01 cm. Cada pata debe de soportar 1/4 del peso de la base, el cuál se compone de:
- Base de acrílico: de 36.0 gramos.
- Arduino UNO: de 26.0 gramos.
- Servo motores de la base: de 10.0 gramos cada uno (40.0 gramos en total).
- Protoboard pequeño: de 15.0 gramos.
- Miscelánea* (carga posible de cables u otros): 25 gramos (esta carga para cada pata).
Con lo anterior, la base tiene 0.117 kg, correspondiendo 0.0543 kg a cada pata. Esto hace que el torque producido por la reacción sea de 0.271 kg-cm. En total, el torque que el motor crítico debe de soportar es de 0.33 kg-cm, el cuál está en el rango de operación óptimo, validando la selección de los motores.
*La carga de miscelánea es sólamente una carga adicional para que se tenga holgura en el cálculo y no sea un dato exacto.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.