 vel17075
vel17075Para la selección de la fuente de alimentación (establecida como alámbrica en la selección de componentes) se realizó una sumatoria de las corrientes que exige cada componente eléctrico en el robot.
Las corrientes de los motores fueron encontradas en distintos datasheets (como por ejemplo la Datasheet de Open Circuit o los datos brindados por Proto Supplies ), así como una pequeña verificación física con uno de estos motores:
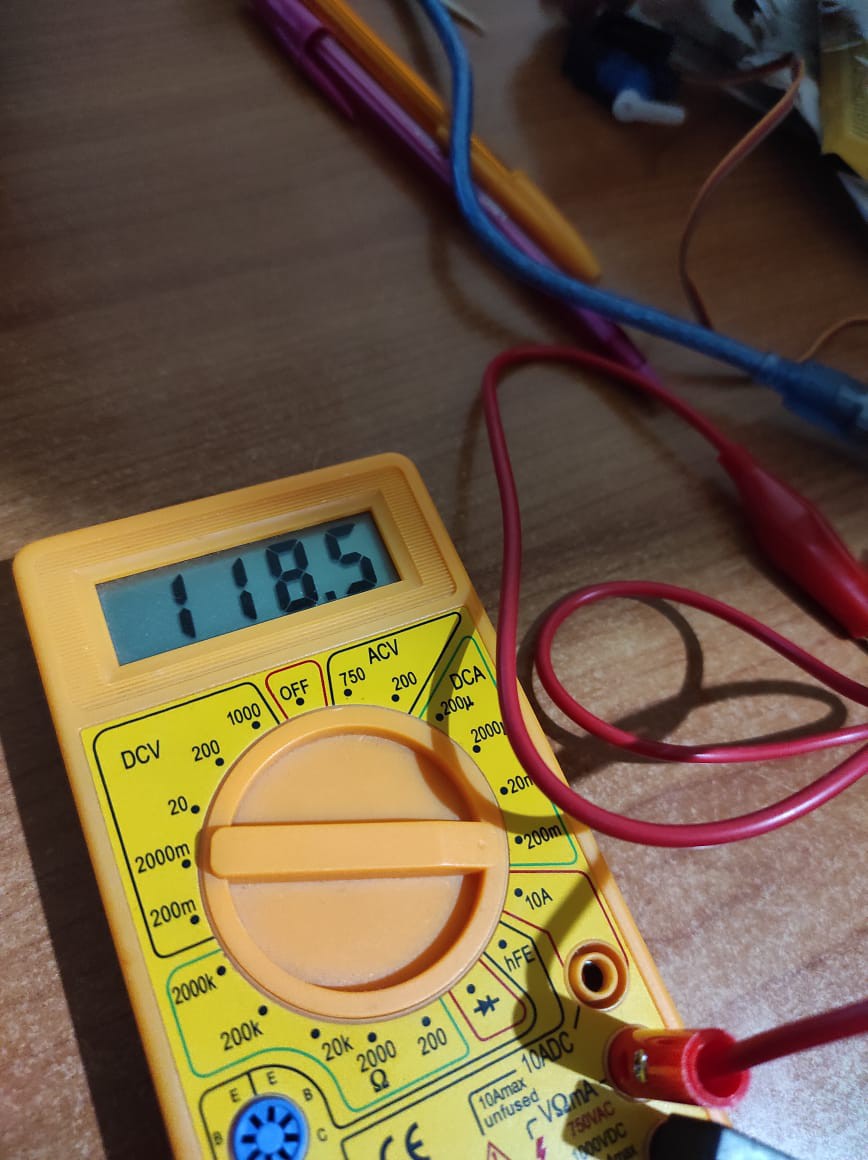
La corriente de 118.5mA se obtuvo al hacerle resistencia al giro del motor; sin embargo, al tener un rango máximo de 200mA, al pasarlos el multímetro no mostró medida, por lo que se tomaron los valores de 225mA en cada uno. Lo anterior se realizó con la idea de diseñar con sobre dimensionamiento. Con lo anterior se generó la siguiente tabla:

Por lo que la alimentación adecuada debe de poder brindar un total de 2.2A. Al momento de realizar el cálculo, ya se contaba con una fuente de 9V de 1A (Adaptador AC-DC de 9V a 1A, de la tienda "La Electrónica"), por lo que, para reducir costos, se utilizará dicha fuente para la alimentación del Arduino UNO, y posiblemente, la alimentación de al menos dos motores. Con esto, se tiene que se requiere de una fuente de alimentación de 1.5A a 5V, por lo que se hará la compra de la fuente AC-DC TMC Variable (3-12V) de 2A de la misma tienda que la fuente anterior. Con esto se cumplen los requisitos de alimentación del robot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.