 vel17075
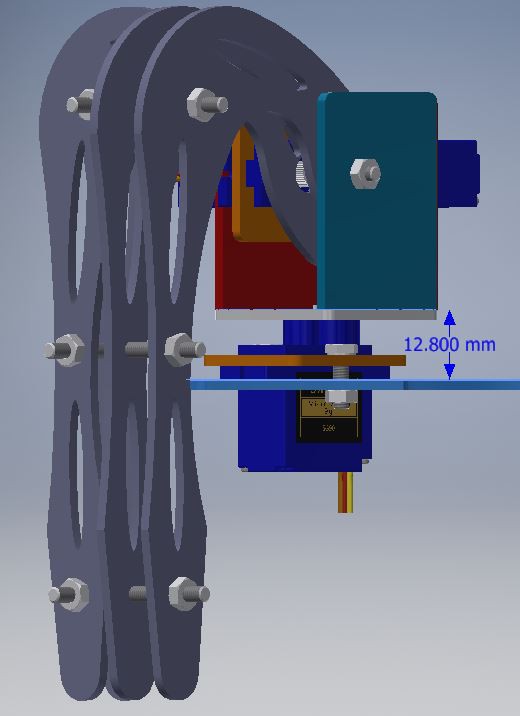
vel17075La definición de los parámetros de la matriz de Denavit-Hartenberg se establece con el diseño físico de una pata del robot. Para ello, se considera la pata como un manipulador serial de 2 grados de libertad, con juntas de rotación. Orientando el eje +x hacia adelante del robot y el eje +z hacia arriba, se utilizó el assembly de Inventor 2019 para realizar las mediciones:
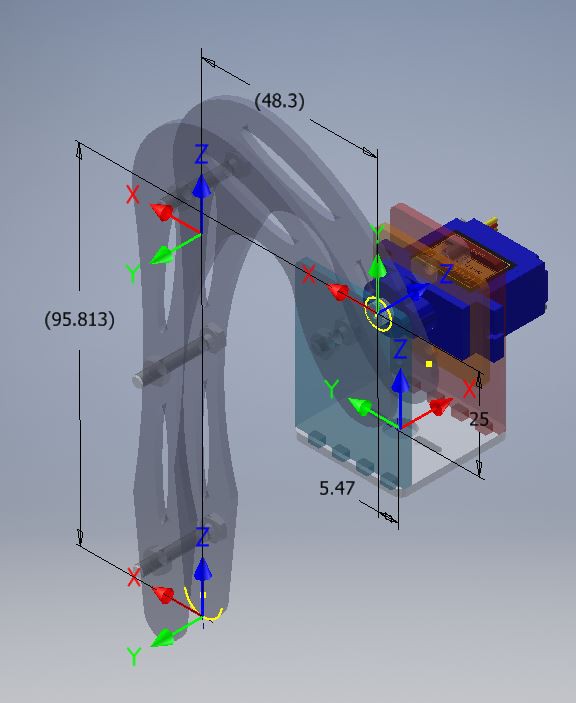
En la imagen anterior, se muestran las mediciones en conjunto con la dirección de los ejes en cada punto. Hay que notar que, solamente se tienen 2 motores (2 parámetros), pero, se desplazó el sistema de coordenadas al final de la pata, trabajando esas transformaciones como transformación de efector final (ya que nos interesa saber en dónde se ubica la punta de la pata). Estos datos generan la siguiente tabla de parámetros DH:
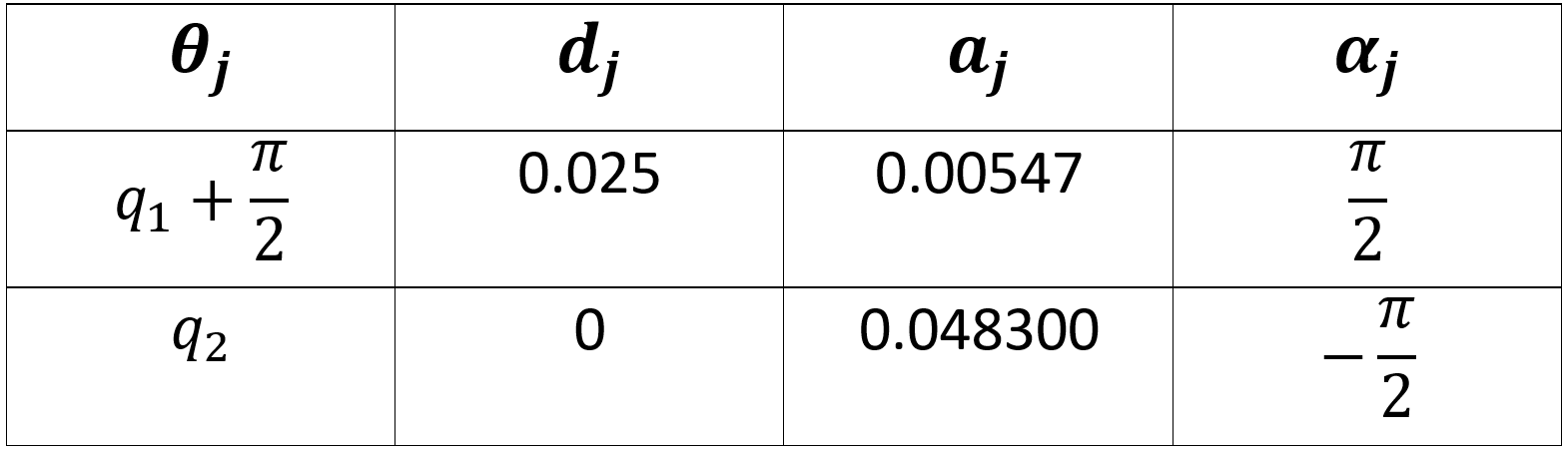
Siendo una matriz con un vector de configuración q de dos dimensiones. Esta matriz es útil para las 4 patas del robot; solamente se debe de tener en cuenta que, para las patas opuestas (lado derecho en este caso), un movimiento hacia adelante requiere el mismo ángulo theta, pero con signo opuesto.
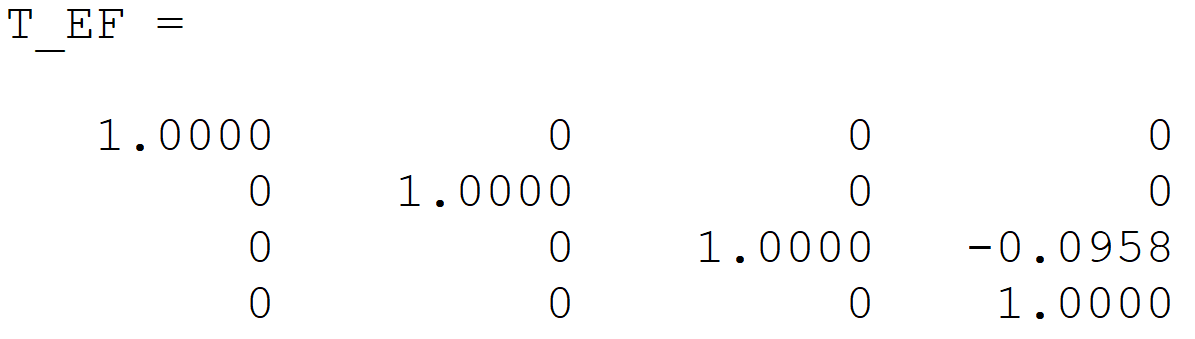
Con los mismos datos de Inventor, se obtiene la siguiente matriz de transformación de efector final:
Para la transformación de base, se midió el tamaño de la base respecto al eje del primer motor:
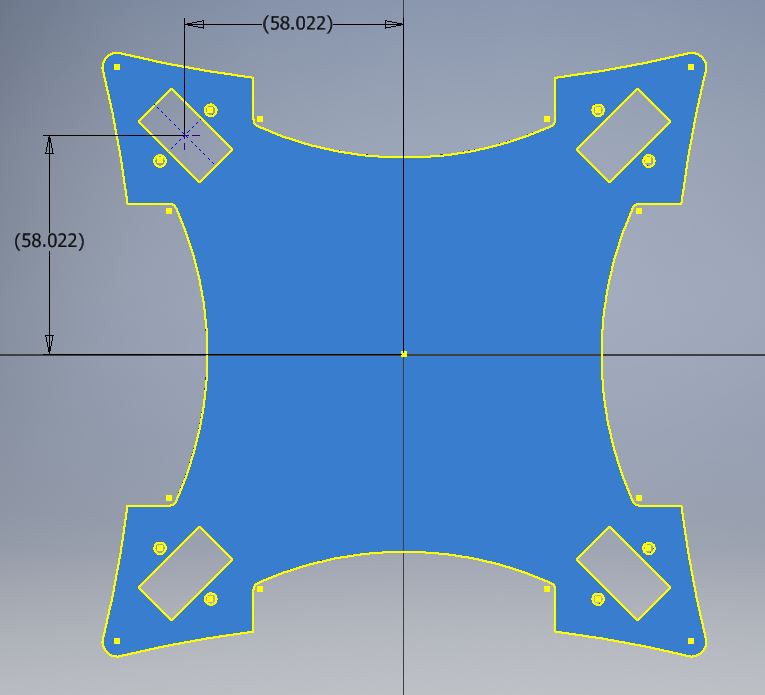
Además, el punto donde se rota se encuentra arriba de la base, por lo que se debe de considerar esta elevación para la transformación:
Además, el sistema de coordenadas de las patas se encentra rotado 45° (en distintas direcciones); esto para que la configuración inicial sea con las cuatro patas apuntando a los extremos de la base, y no a los lados. Con lo anterior, es posible obtener las matrices de transformación de base:

Esta matriz se repite para las 4 patas, siendo variable únicamente el signo de los valores (en dependencia del lado en el que se encuentren).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.