 techknight
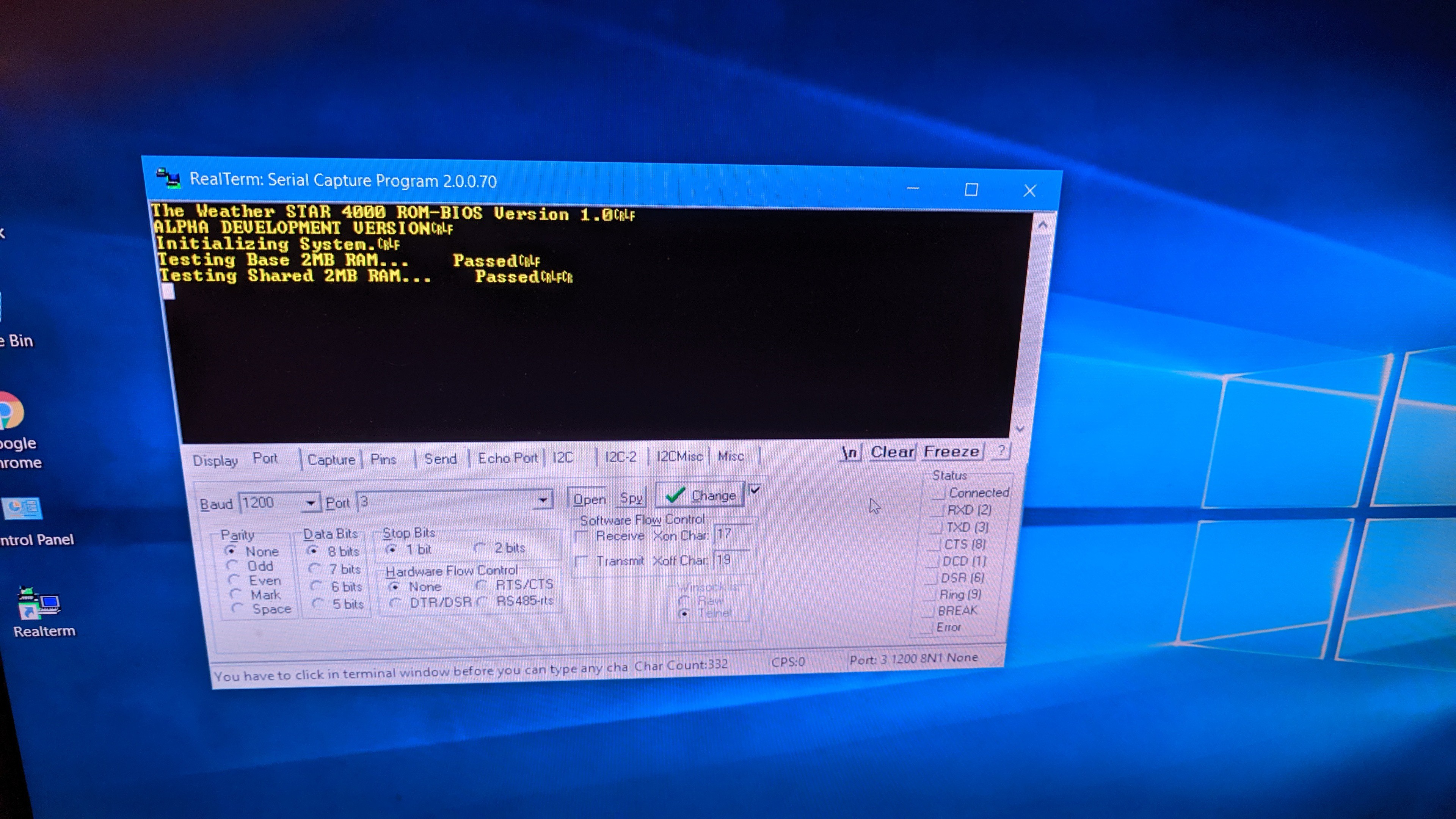
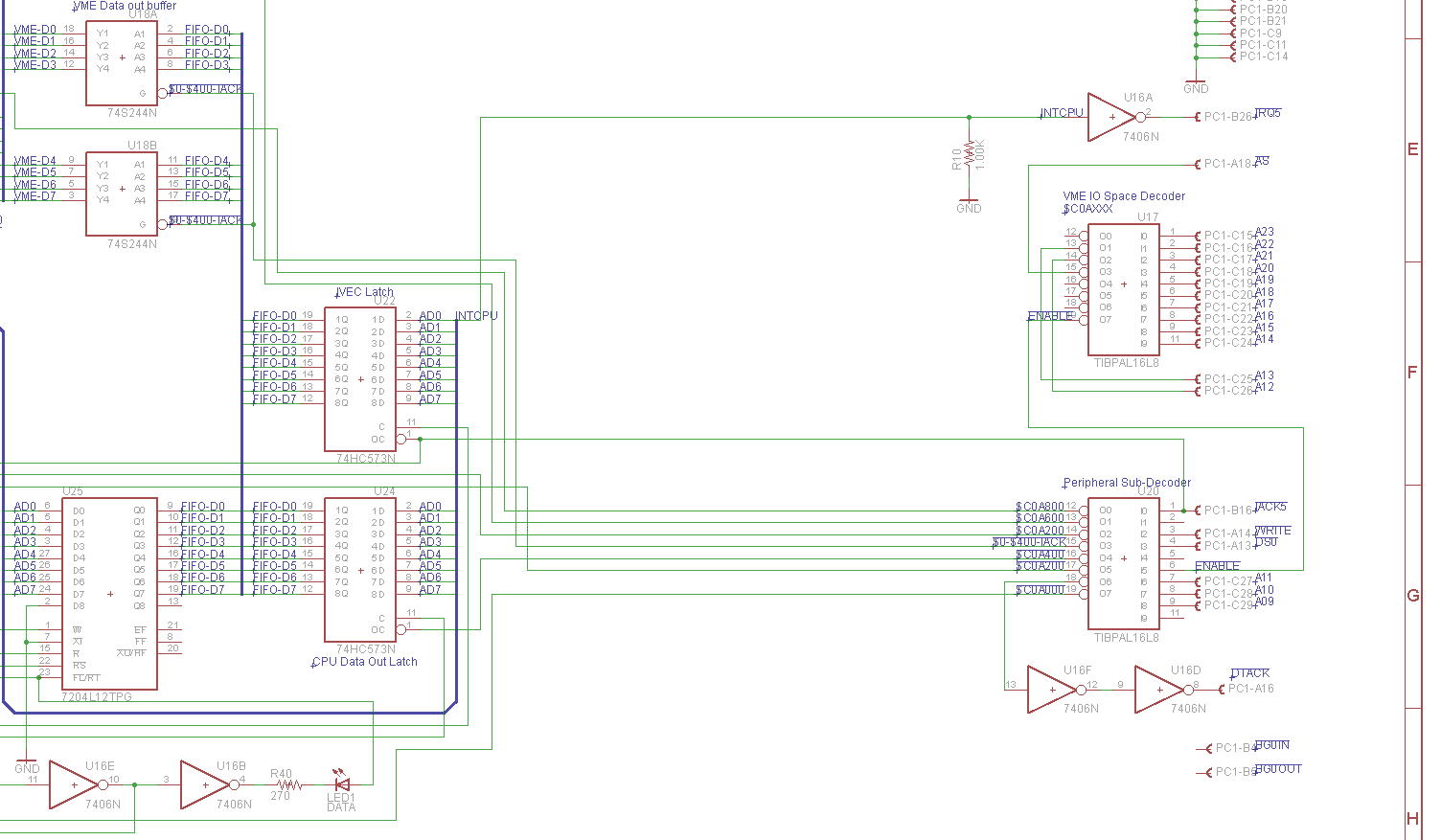
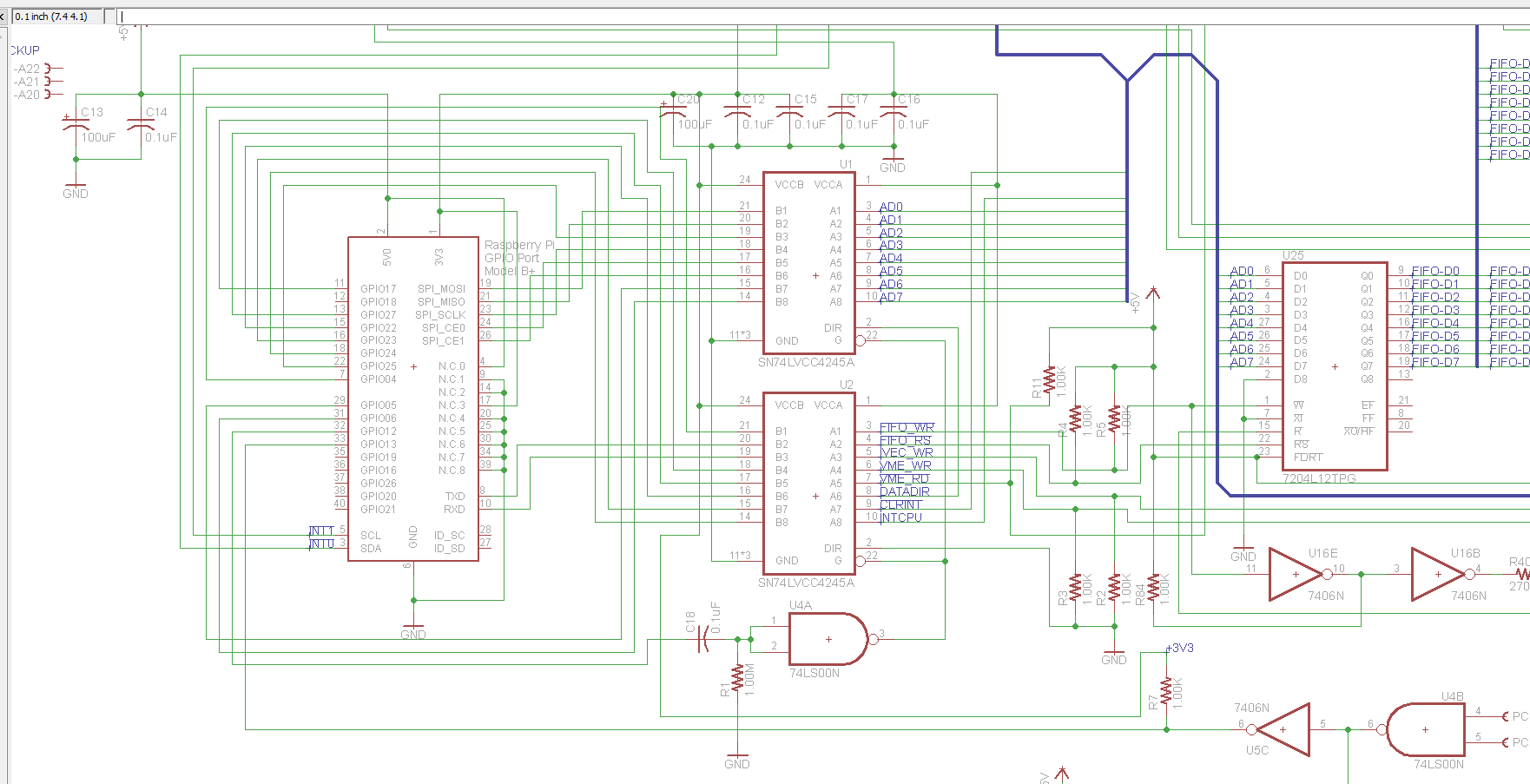
techknightWe bring this 1980s machine into the modern world as an IoT device to receive data and render presentations like it used to, once again... Bridging the digital divide between 68K satellite-era hardware and the internet :-)
0%
0%
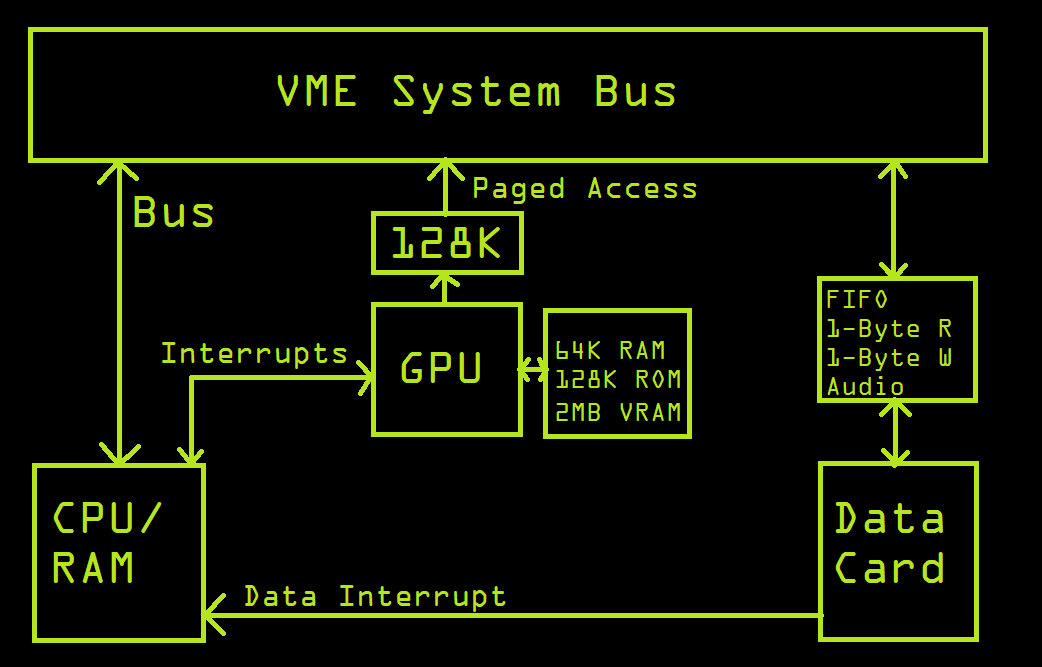
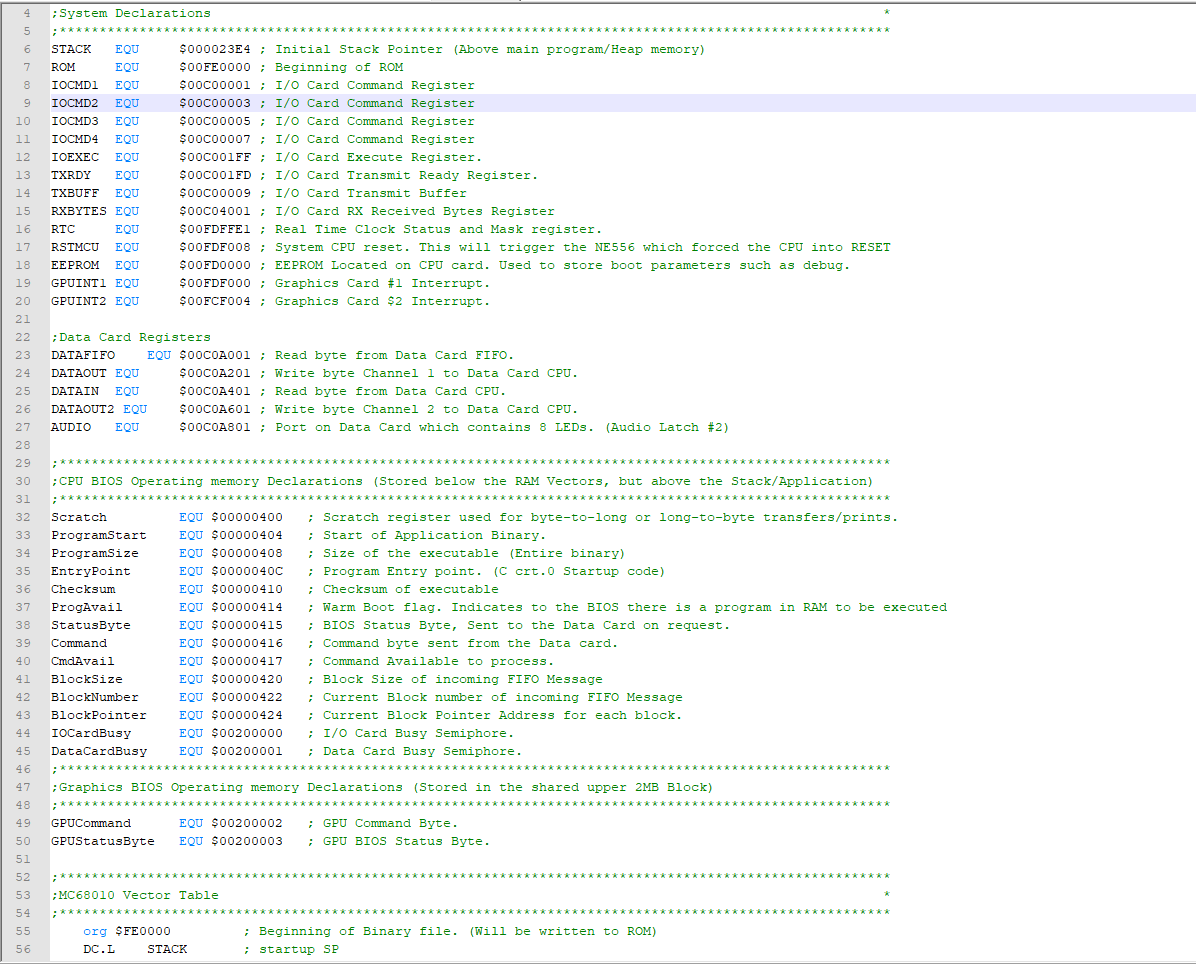
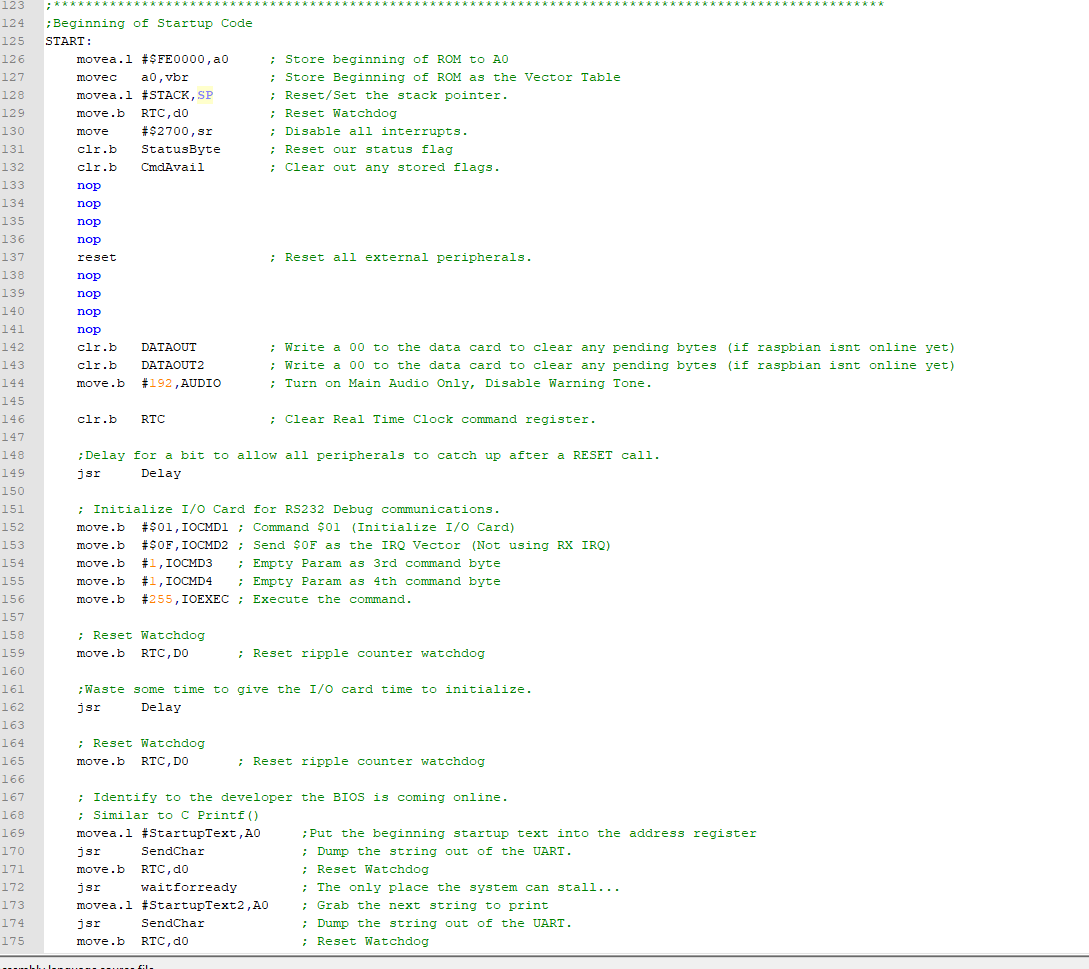
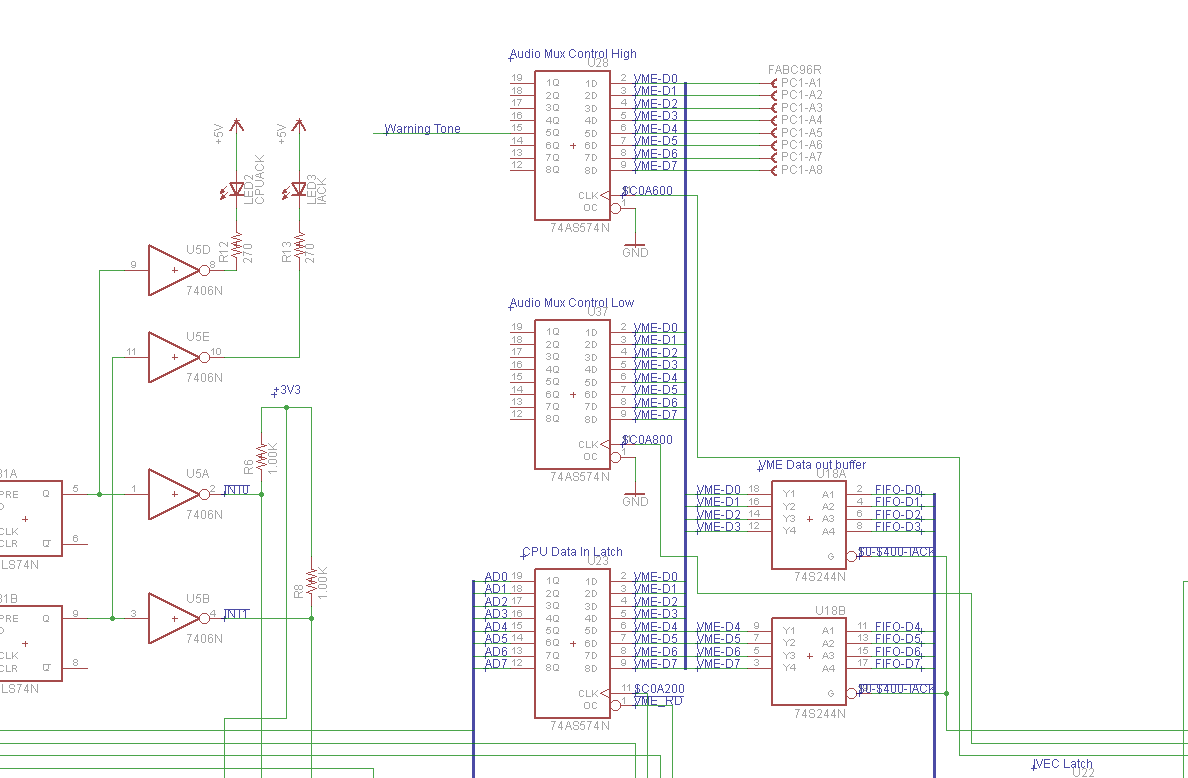
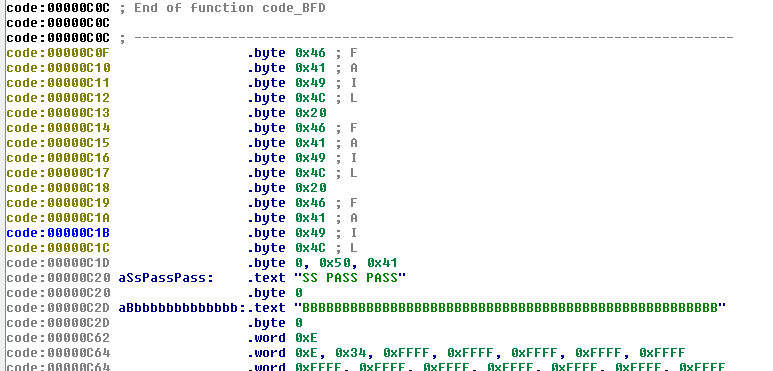
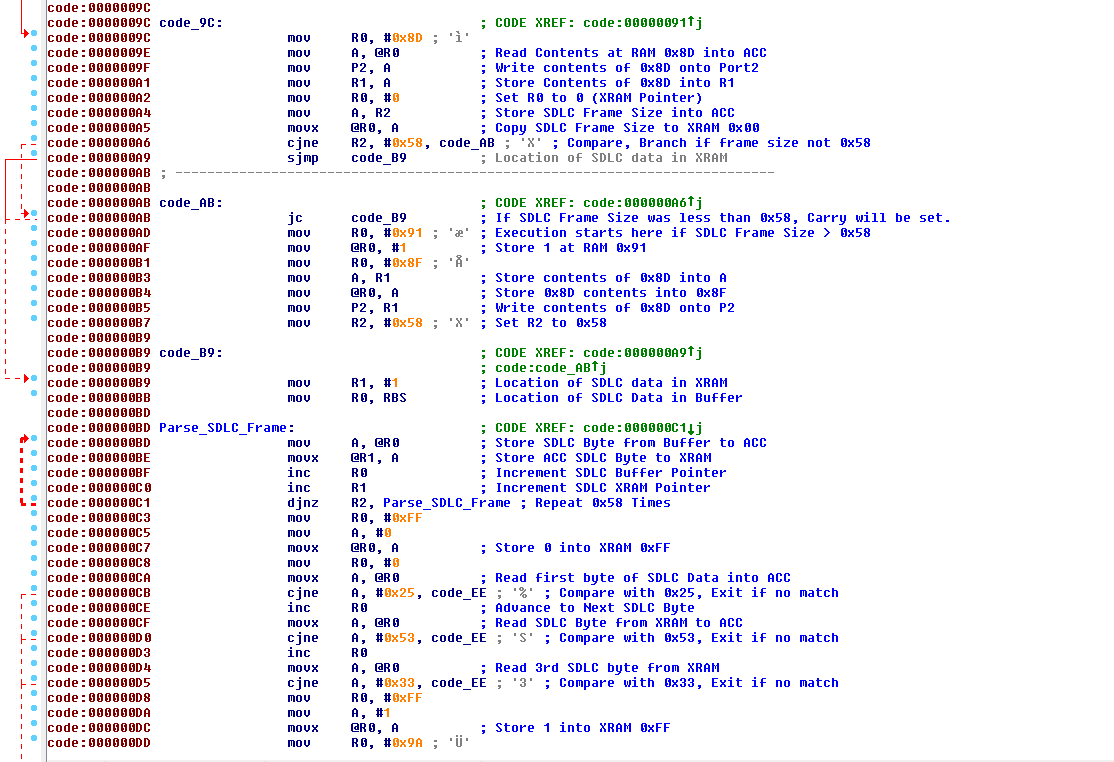
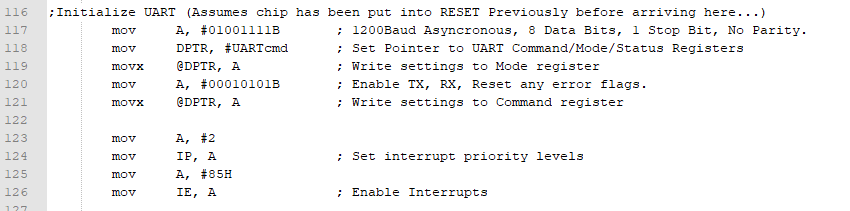
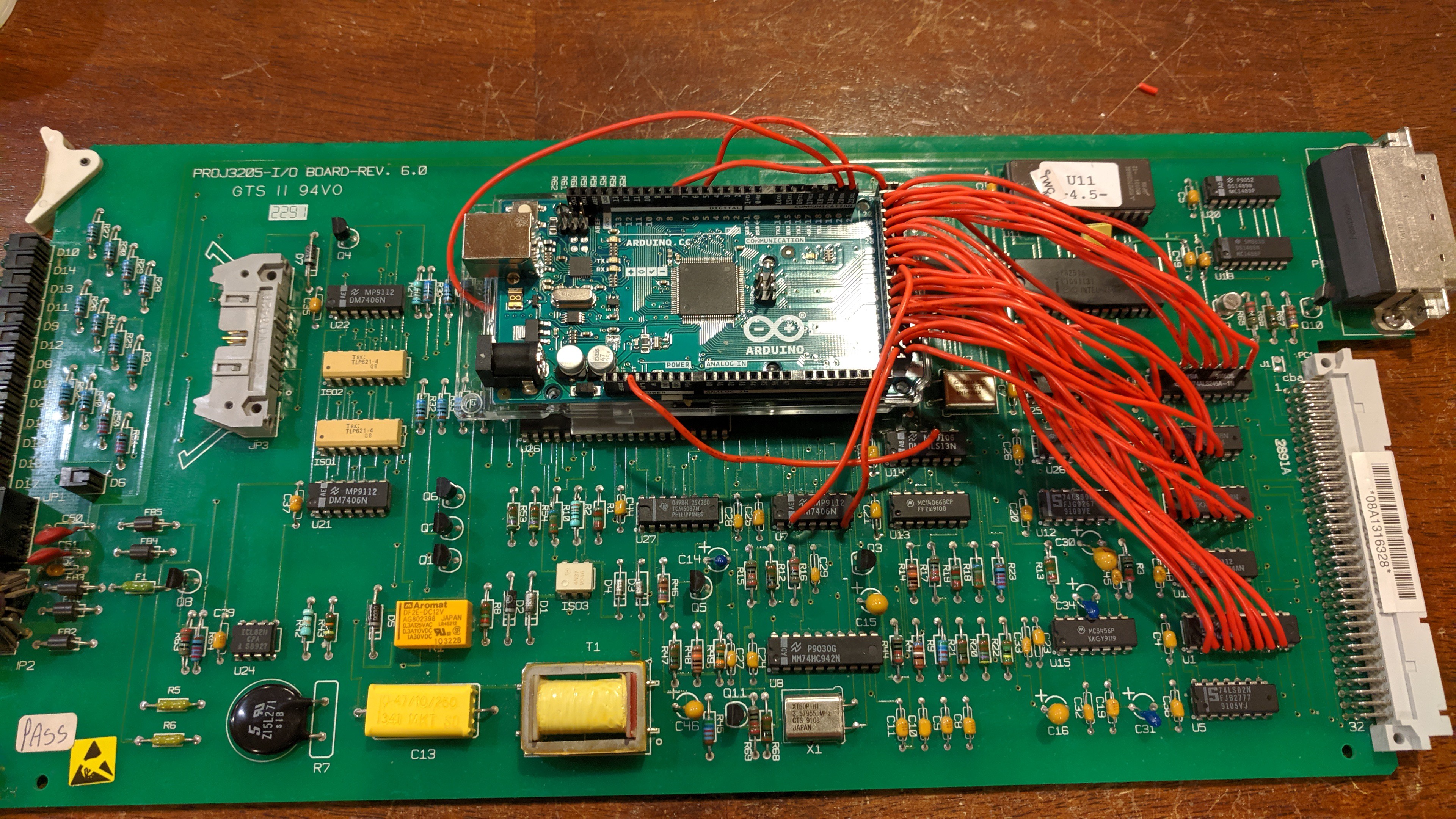
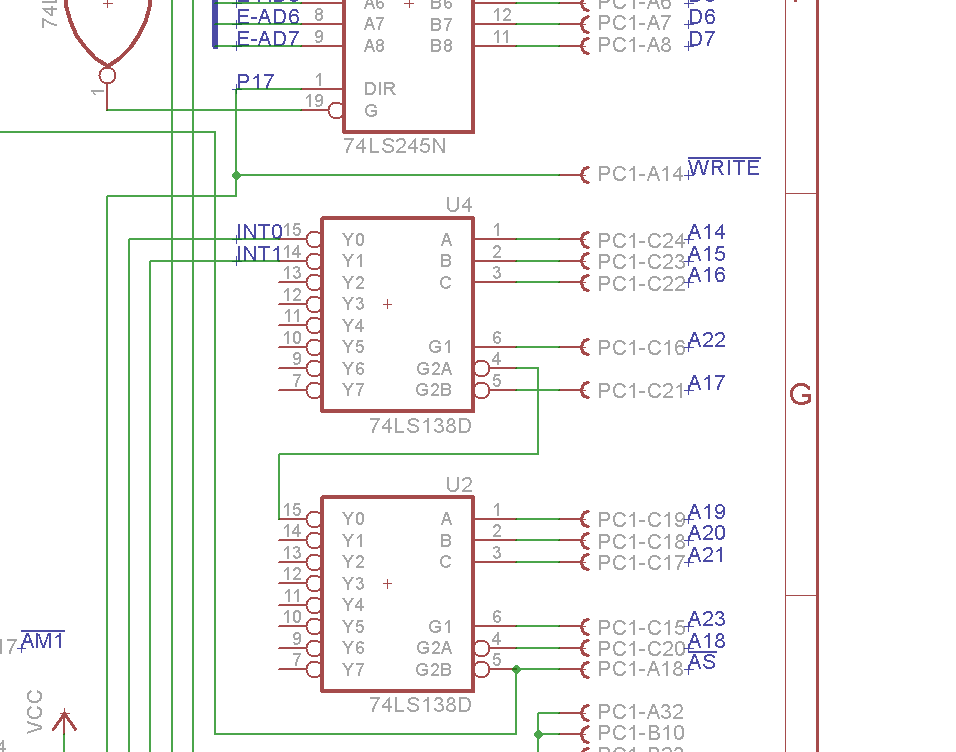
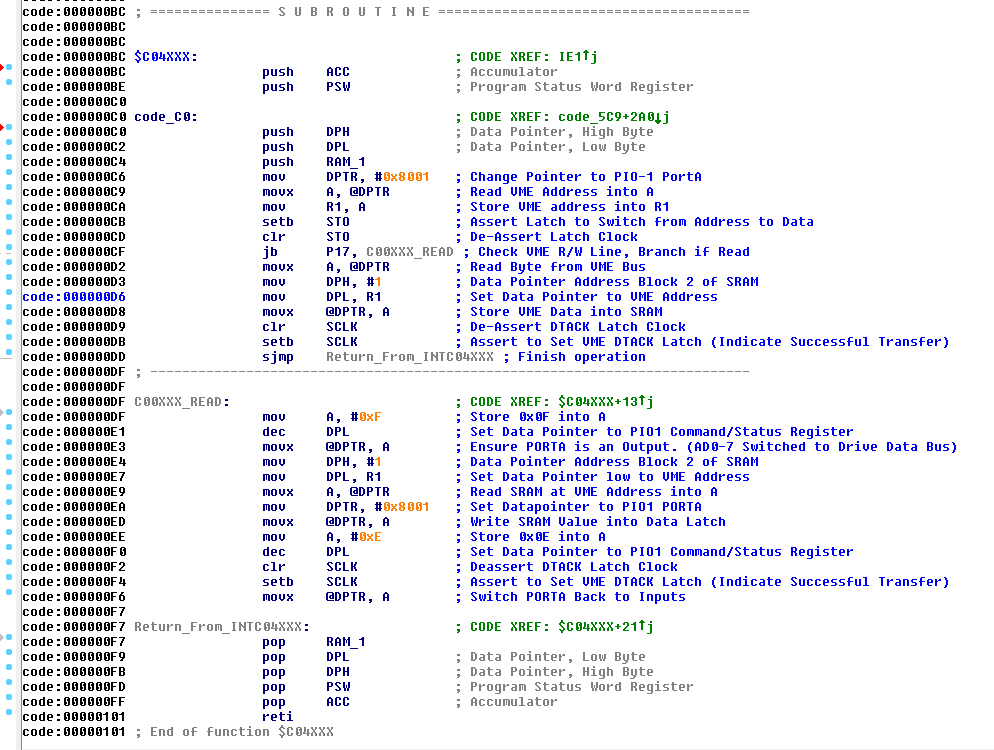
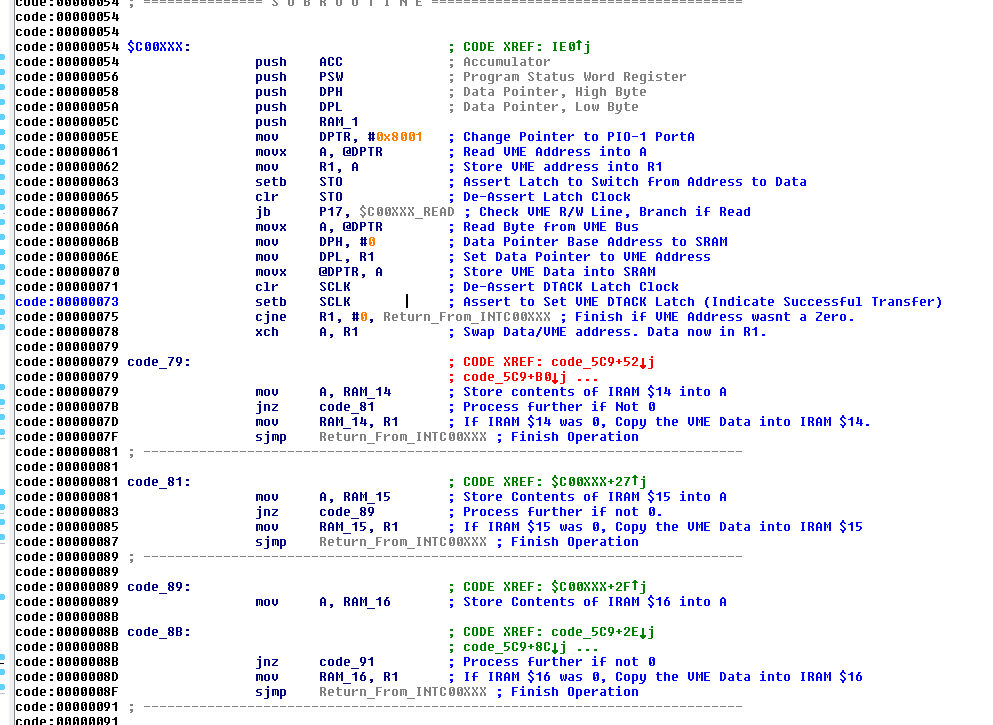
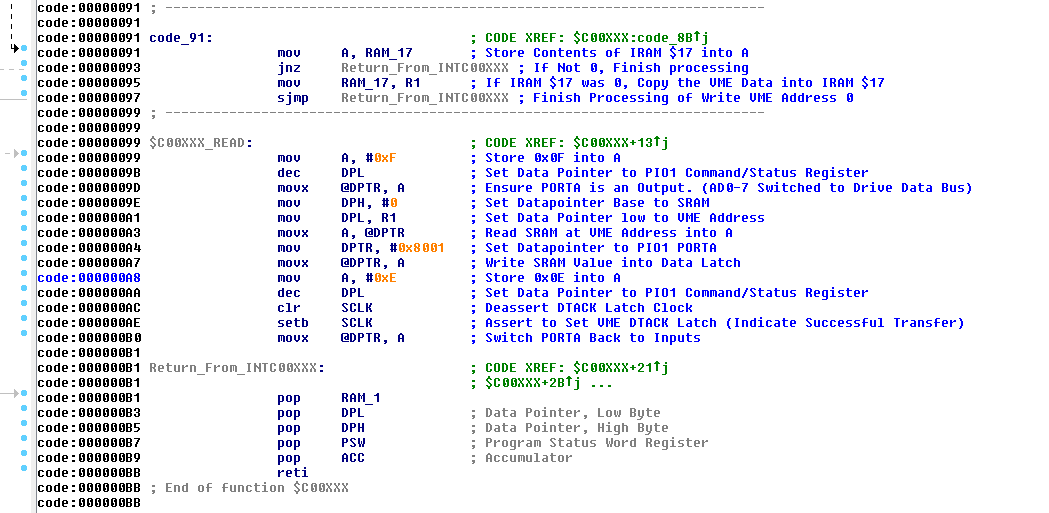
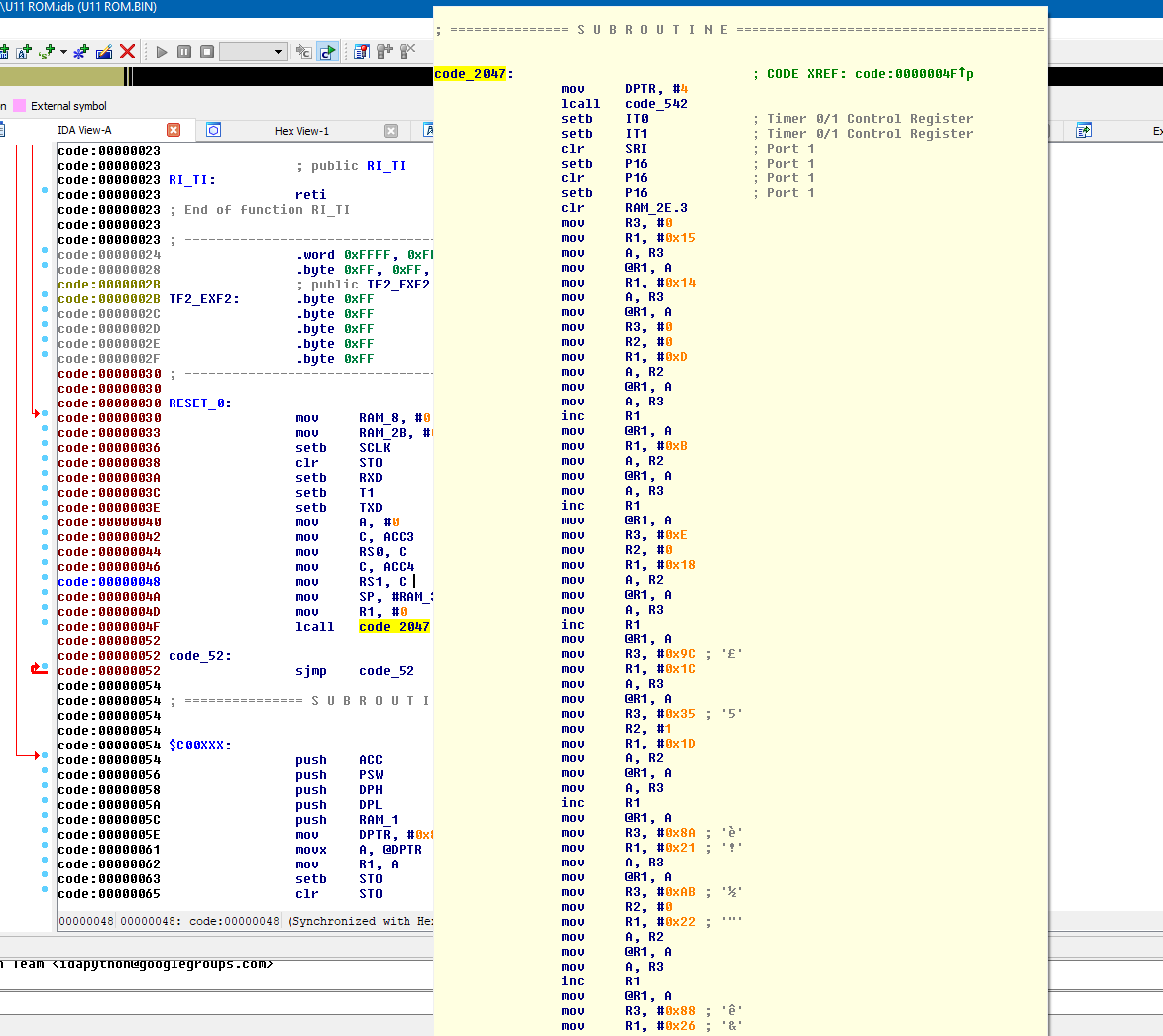
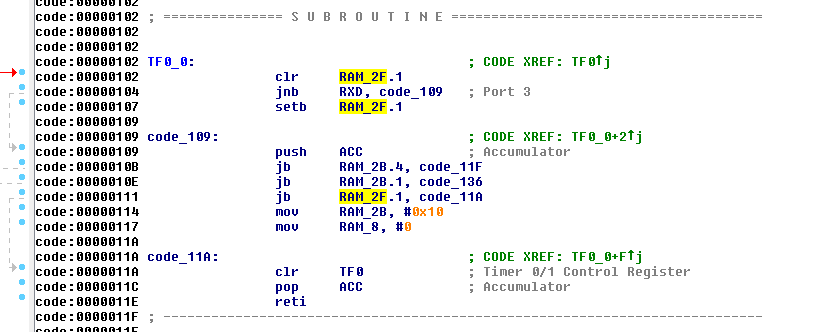
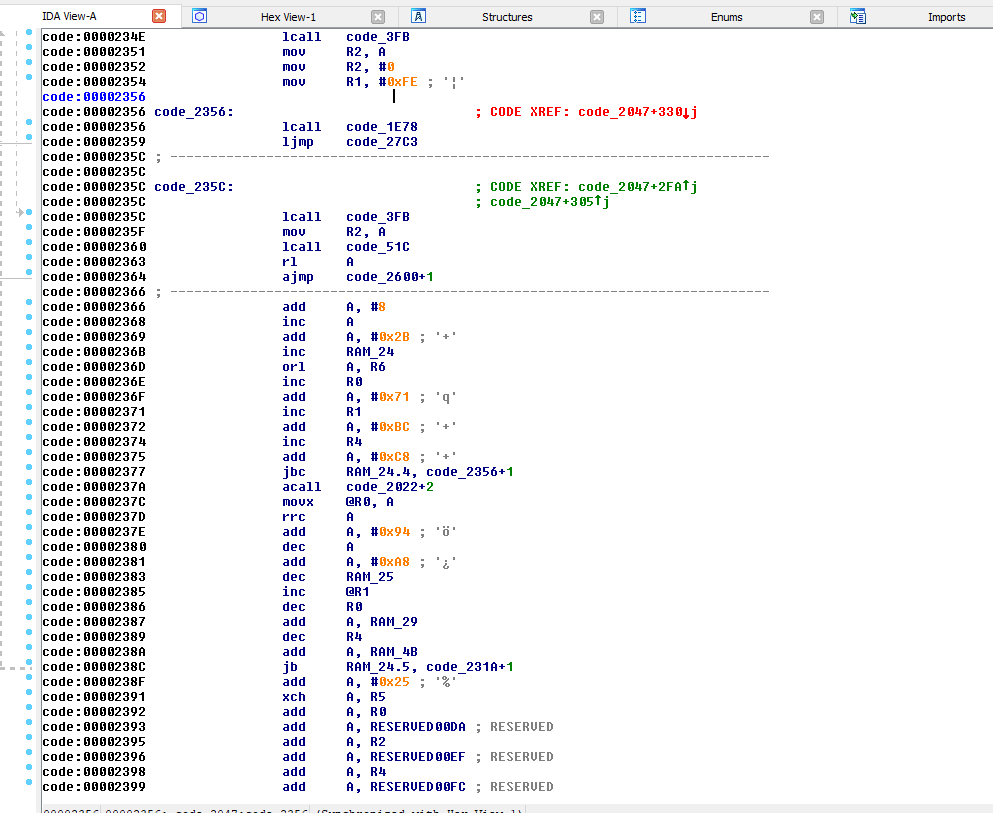
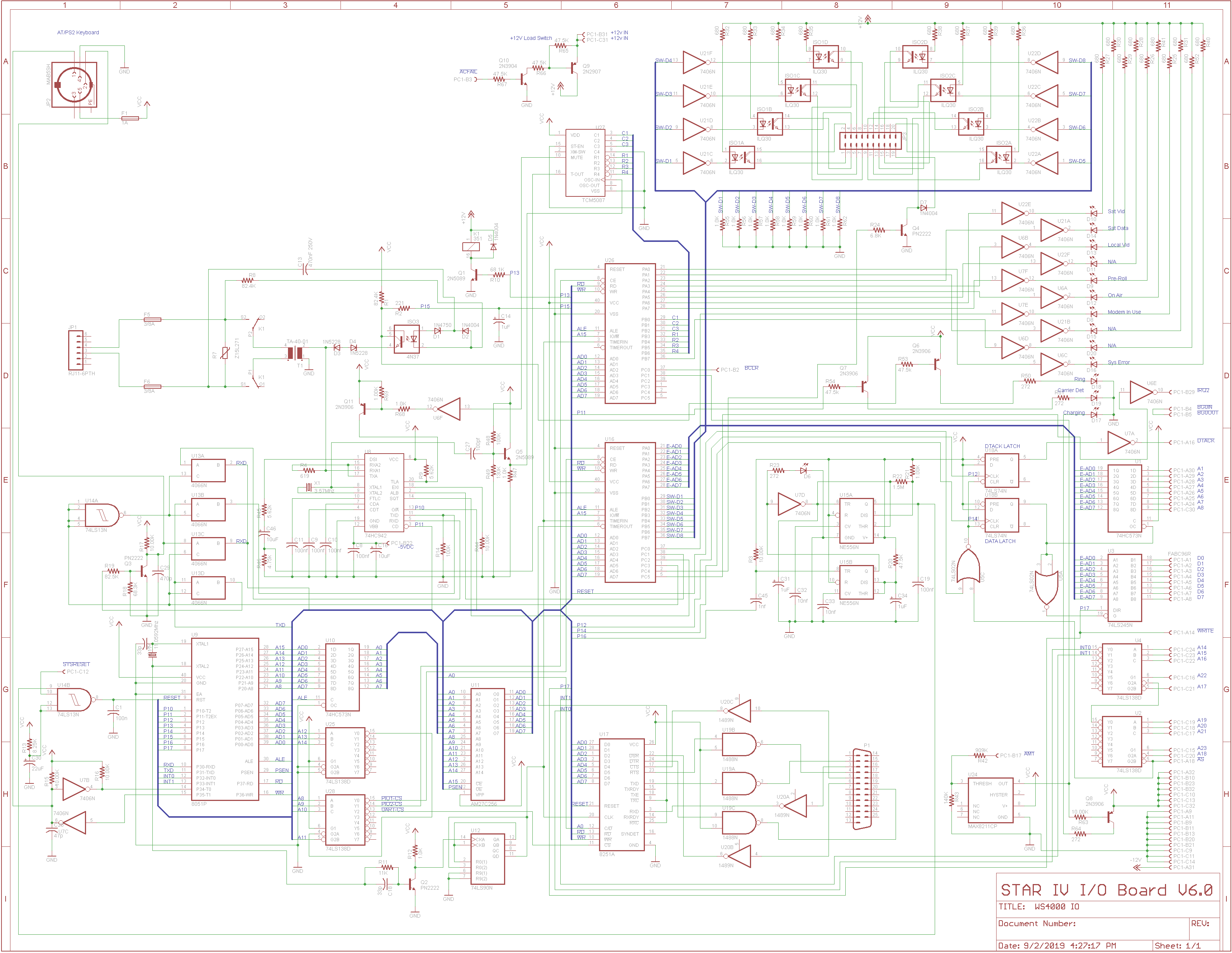
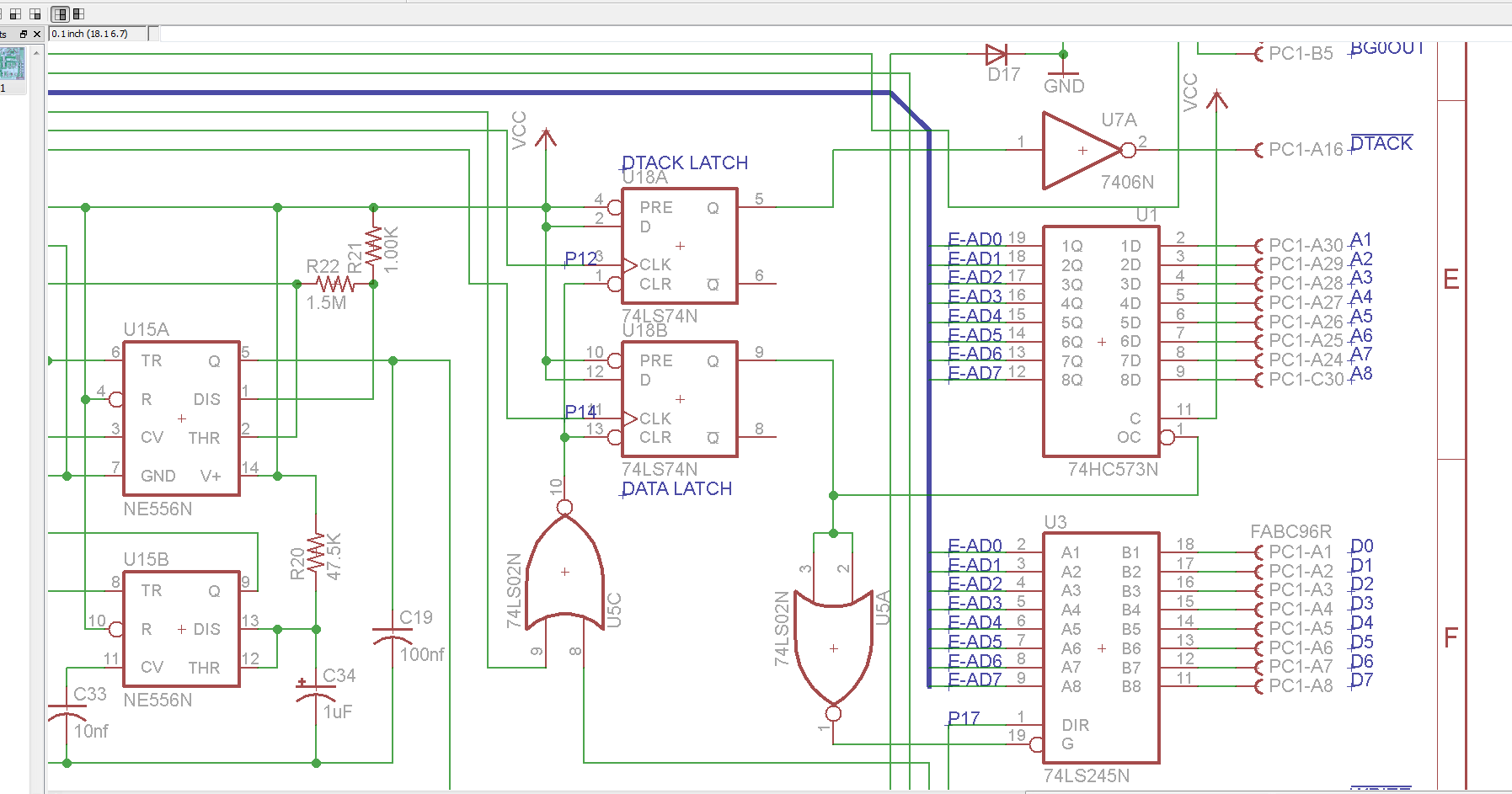
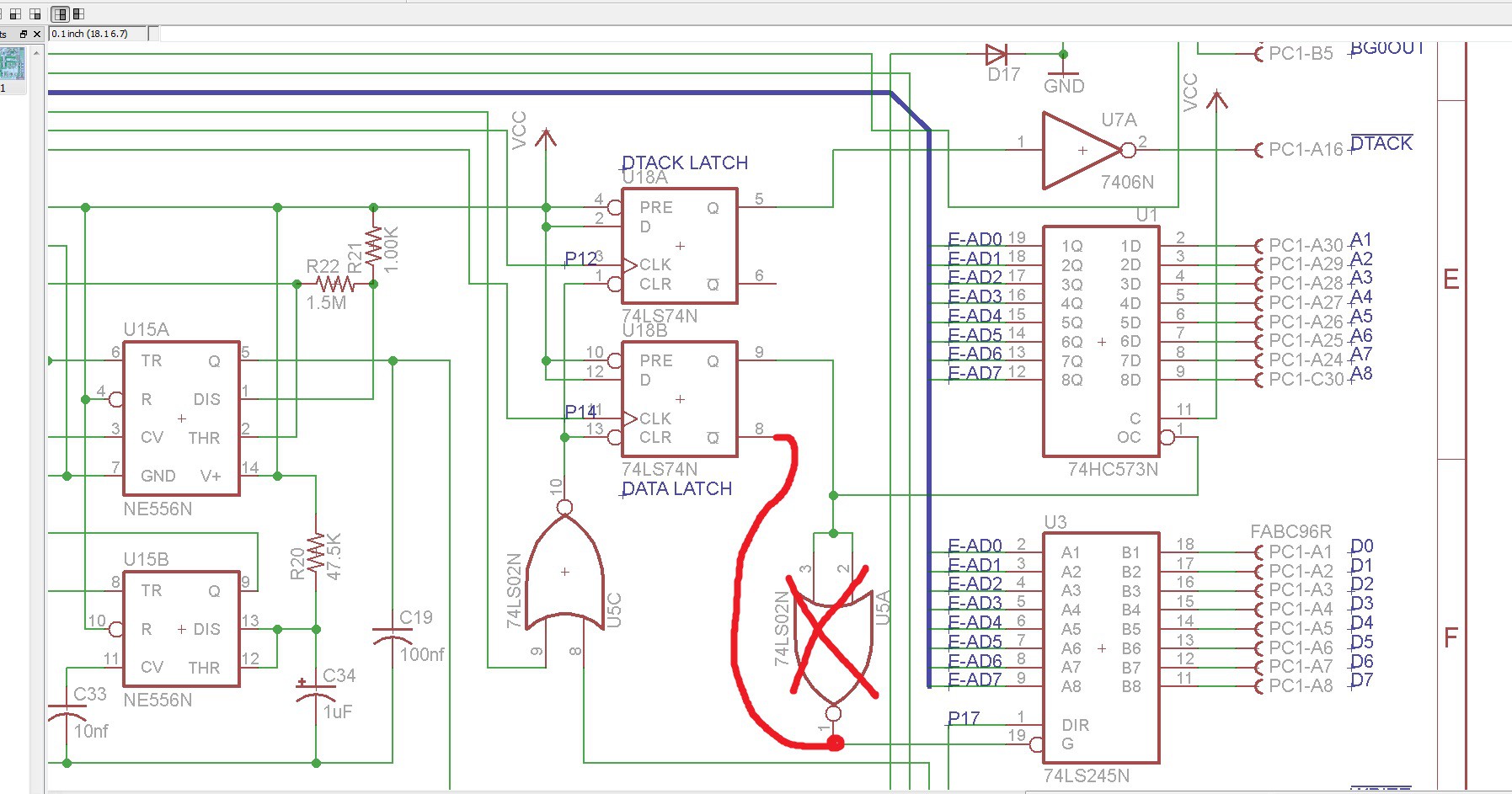
Reverse Engineering The Weather STAR 4000
The Weather STAR 4000: A Journey of reverse engineering the hardware to an iconic machine of the 1980s/90s.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests








 Nick Bild
Nick Bild
 James Ots
James Ots
 Stuart
Stuart
 mateusz.kolanski
mateusz.kolanski
nice :]