Giovanni
Giovanni-
3d printed case and ground testing
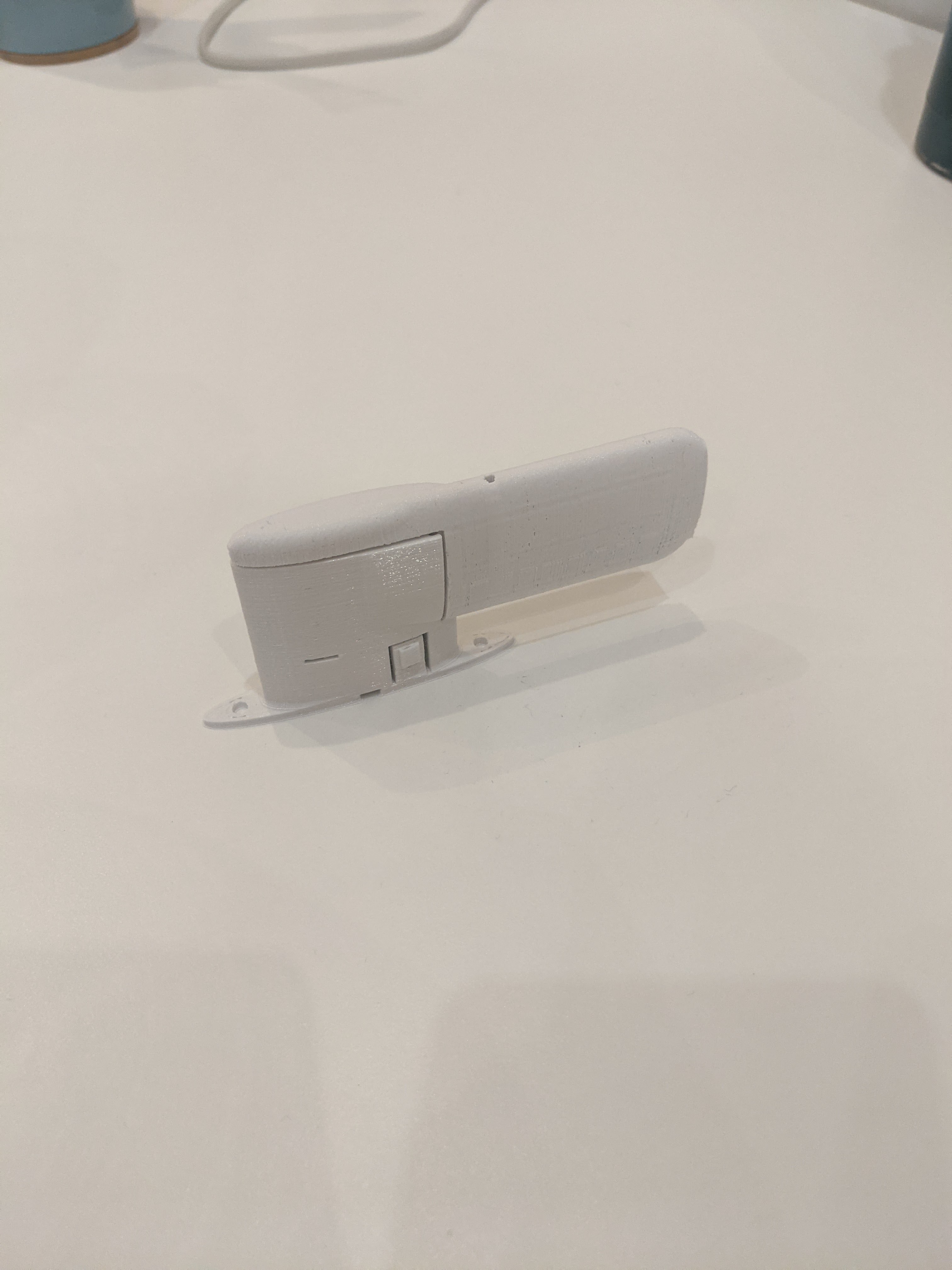
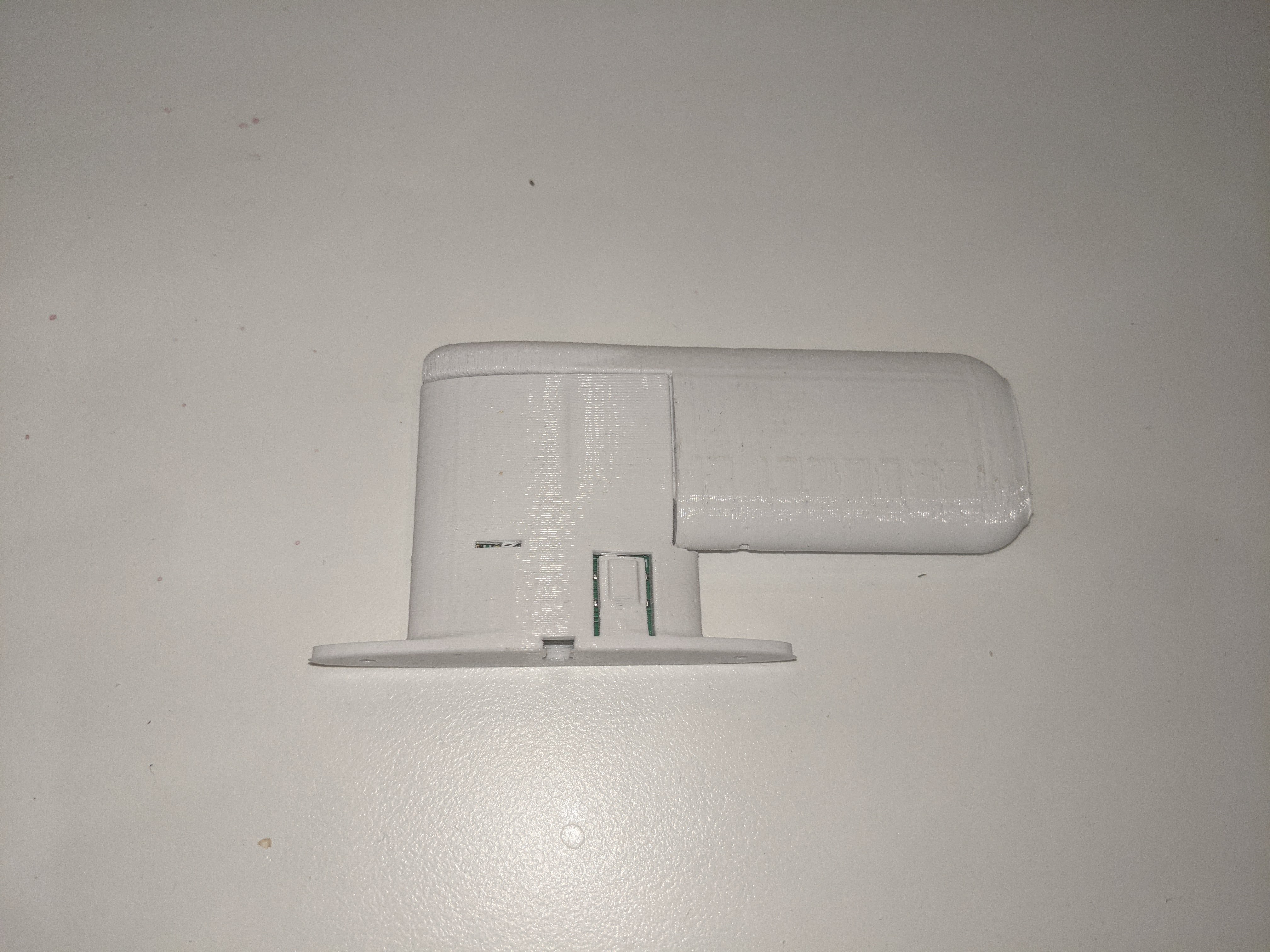
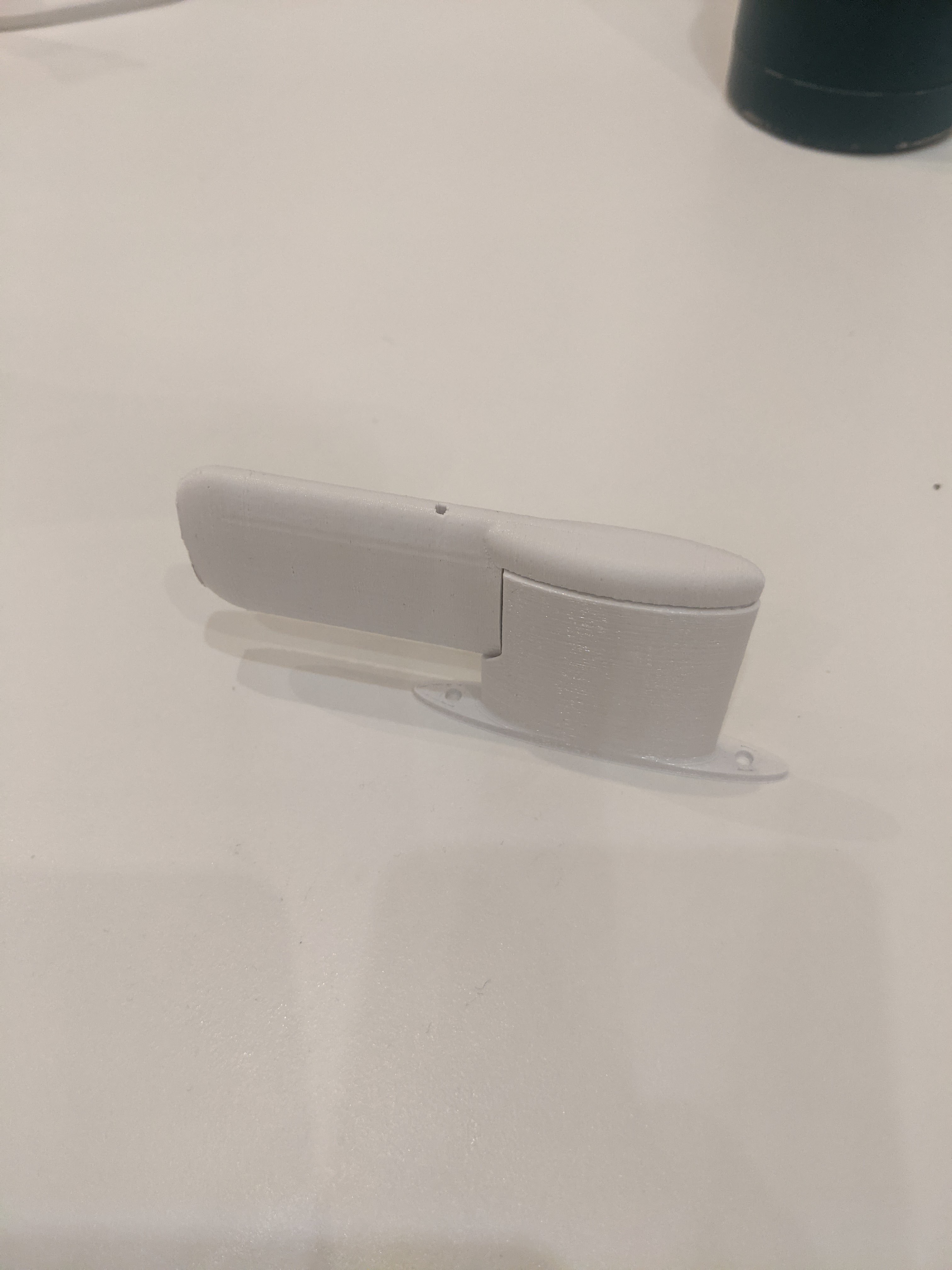
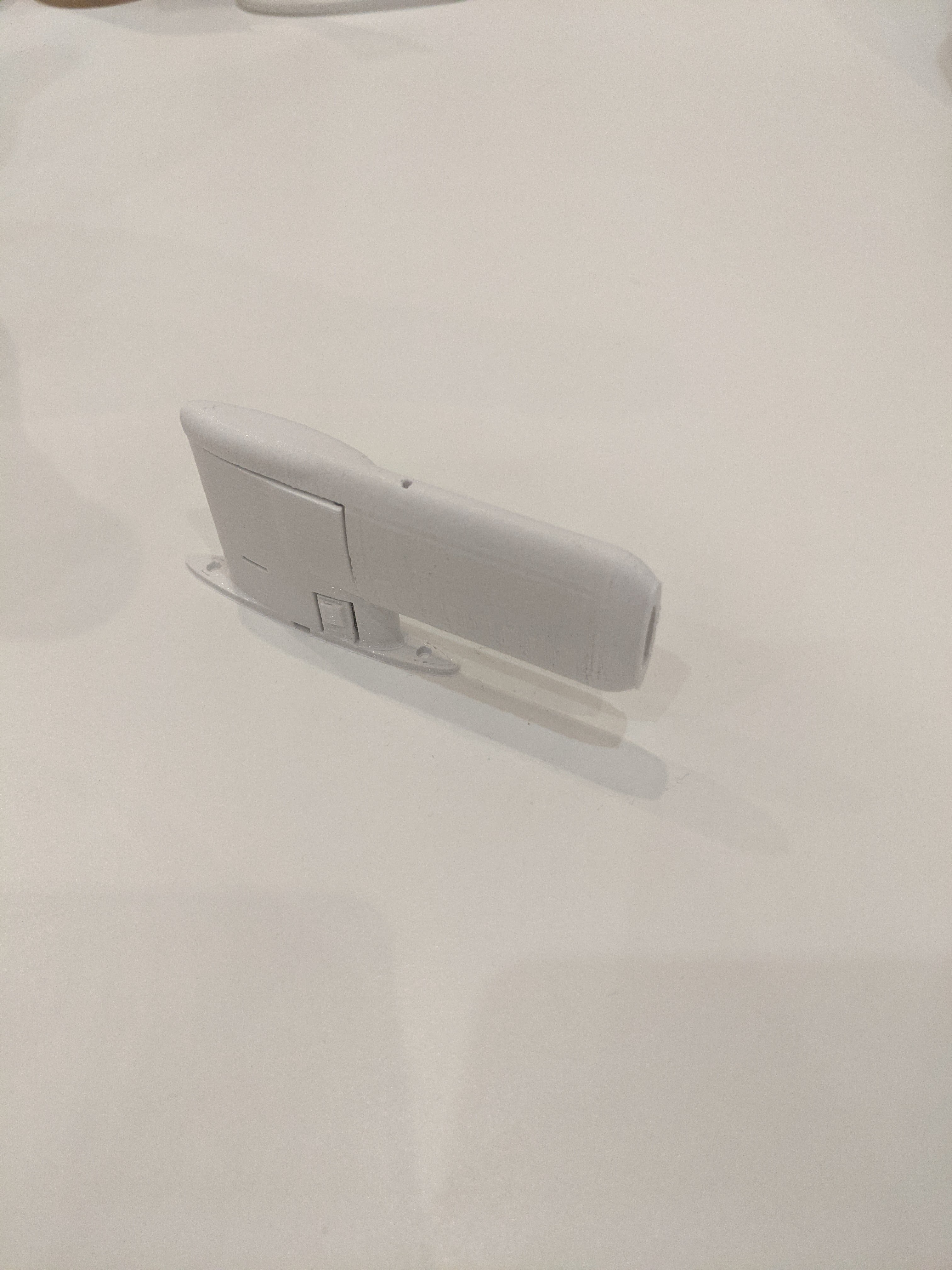
04/11/2021 at 14:22 • 0 commentsI designed and 3D printed the case and mount for the PCB. (it should be a 2h print.
I attached the files for it.
I also tested the sensor while driving around for an hour (I was on the passenger seat ;) ):
- barometer drift was never over 10km/h (at low speeds, but it gets much more accurate as speed increases)
- both altidude and speed were sent reliably to INAV via MSP
Next step it is flying it, but this one will take a while unfortunately (I am waiting for a few pieces to get my plane back in order)
![]()
![]()
![]()
![]()
![]()
-
Great progress
04/02/2021 at 23:12 • 0 commentsI received the PCB and wrote the code for it, first results are promising.
First results:
- The PCB with the components already soldered costed me around 5€
- I can detect variations of 1Pa and overtime I get a drift of 10Pa which is not bad as it means that reading above 4m/s 15km/h should be accurate and get more accurate as speed increase
- I programmed the board to read data from the baros and calibrate them using the push button
- I managed to send the results to INAV using MSP and seeing them via the INAV configurator
Next steps:
- Design and 3d print a case for it and fly it
Cheap airspeed sensor for INAV
Airspeed sensors are quite expensive, while barometers are cheap. So why not making an airspeed sensor using 2 barometers?