 Joe Kale
Joe KaleLearning the F' Framework by building a Tank Steer robot.
0%
0%
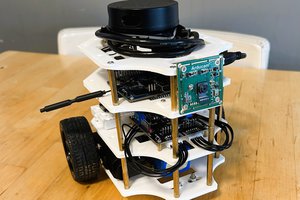
Robot Tank Using NASA FPrime
Building a tank steer robot using NASA JPL's FPrime framework.
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
 TripleL Robotics
TripleL Robotics
 Daniel James Evans
Daniel James Evans
 Juan Jose Sepulveda
Juan Jose Sepulveda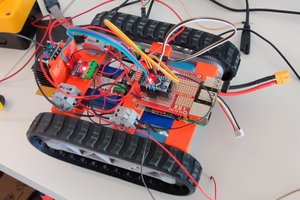
 Pengu MC
Pengu MC