 Wissam Tedros
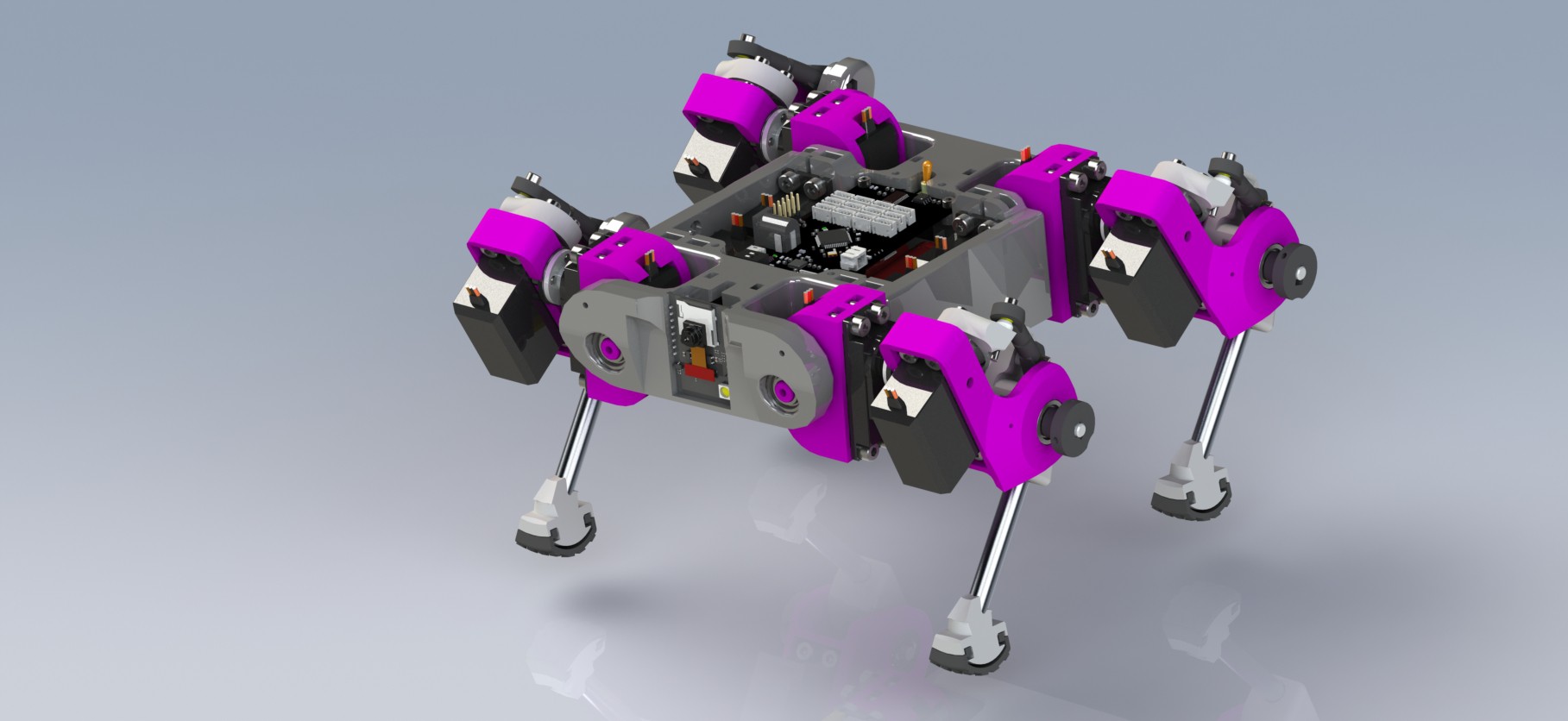
Wissam TedrosI think this is what I'll settle for as a final-ish mechanical design, it is as compact as I wanted it to be, main body is 20x10x5cm, it has some vibrations, I'm suspecting the backlash in the RC servo, I have some thoughts to add light spiral springs to solve that. I'm currently animating the Model using Simulink Simscape Multibody, once happy I'm going to apply my control loop to the embedded system I made.




Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.