 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠
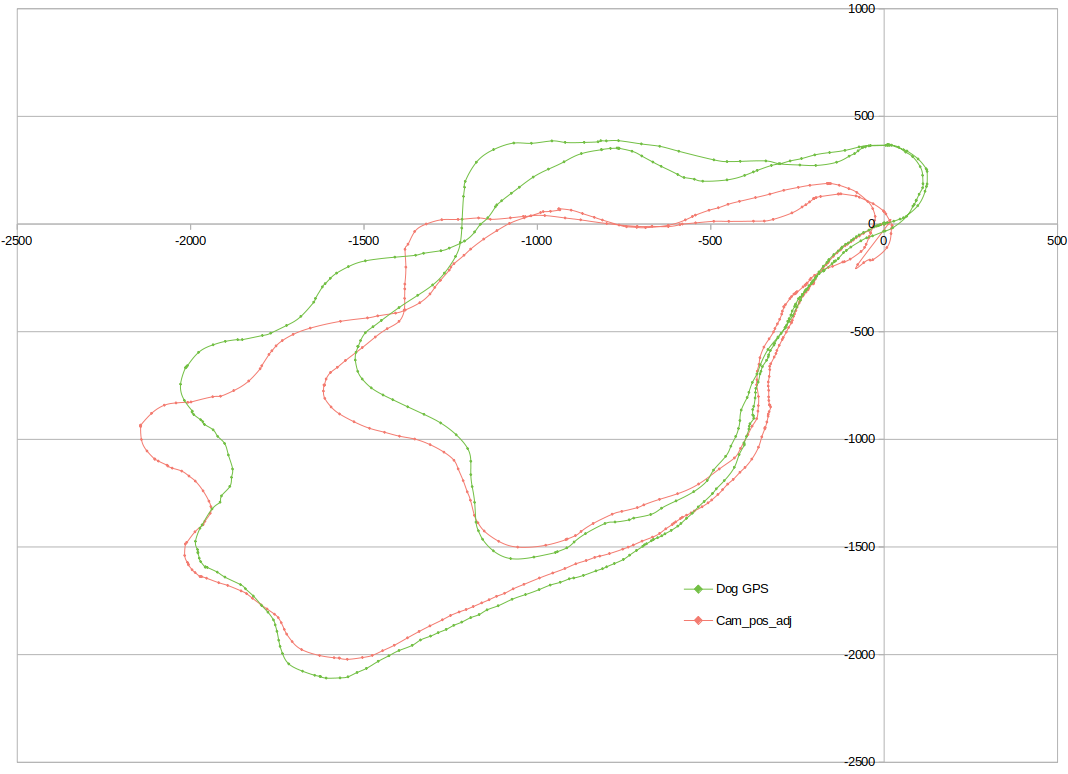
The robot was driven 2 different laps around some fields with the GPS and T265 camera data being recorded to a CSV file. We use animal terminology for all parts of the robot and the main 'thing' is called 'dog'. It also has a snout, eyes and even a lair, or 'nest'. All will be explained later !!!
Another rest run using a different route:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Nice project! What is the unit of your figures?
Are you sure? yes | no
Thanks. It's cm and the GPS was accurate to no worse than +- 5 mm !!!!
Are you sure? yes | no