Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠-
First Autonomous Test
07/07/2021 at 07:40 • 0 commentsThe QuadROSbot is now autonomous!
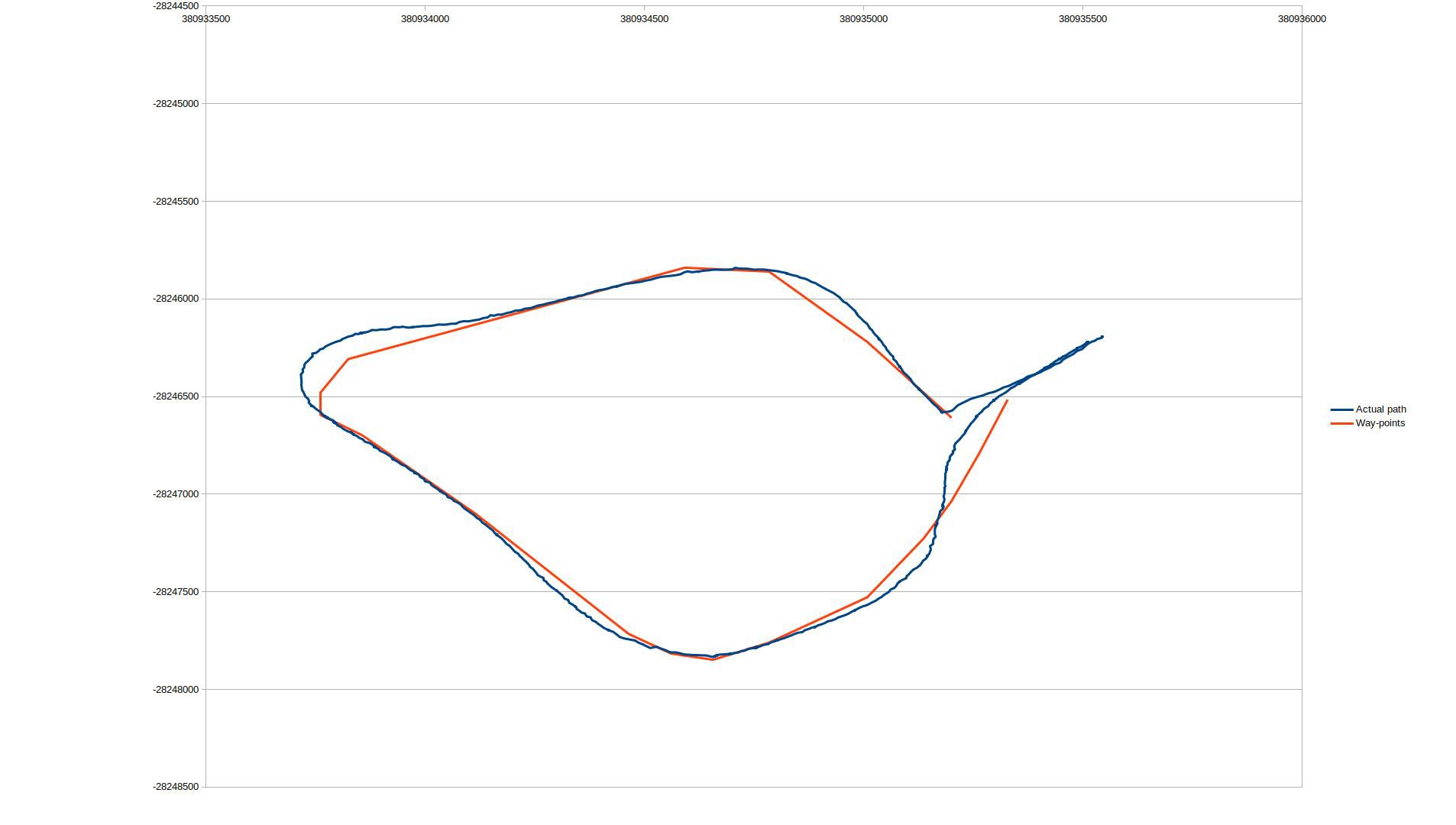
The image below shows the original waypoints in red and the actual path taken in blue. The throttle was controlled manually, but the steering was automatic and, as can be seen, the robot followed the way-points fairly well:
![]()
There's a noticeable over-shoot in the top left corner which can hopefully be corrected with a bit of fine tuning. -
Robot Communication Tower
05/05/2021 at 09:35 • 0 comments![]()
The tower features a Multitech IP67 base station with onboard 4G, WiFi and 8 channels of Lorawan, all mounted on a home grown piece of larch harvested from our own woodland. The plan is to use 2.4 and 5 GHz WIFI to communicate with the robot, live streaming data and video feeds to the control room. The Multitech box itself will be hard wired with ethernet cable to the control room.
-
Testing navigation system - data harvesting
04/17/2021 at 09:25 • 2 comments![]()
![]()
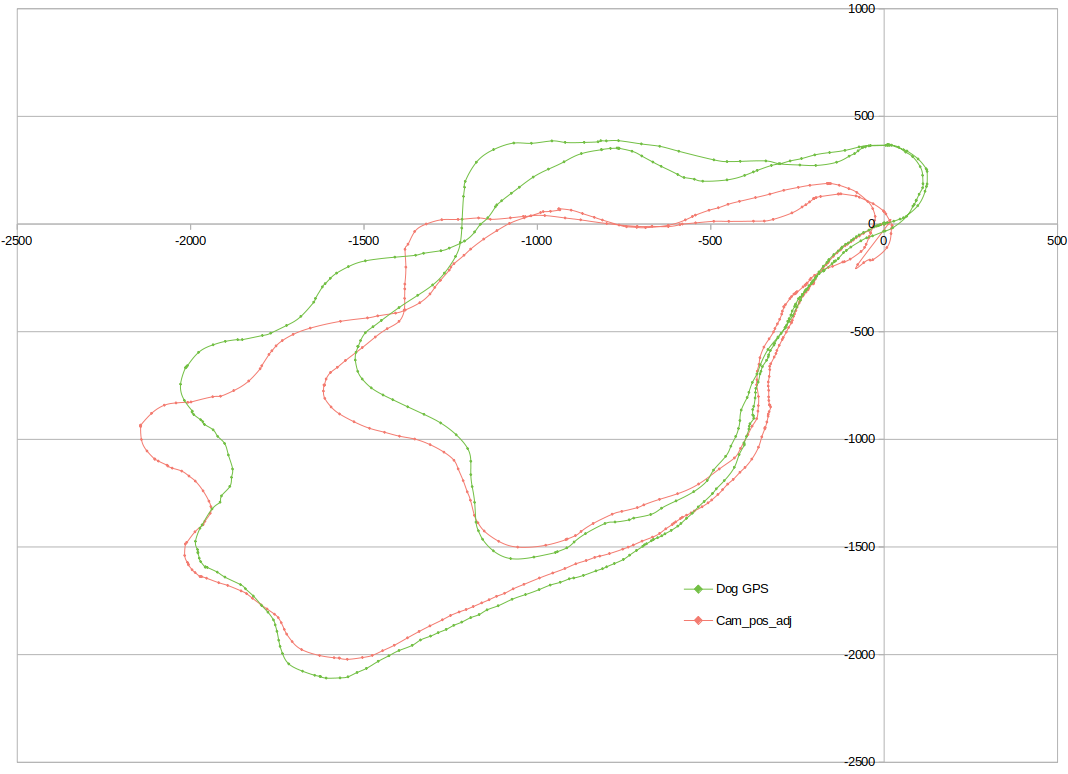
The robot was driven 2 different laps around some fields with the GPS and T265 camera data being recorded to a CSV file. We use animal terminology for all parts of the robot and the main 'thing' is called 'dog'. It also has a snout, eyes and even a lair, or 'nest'. All will be explained later !!!
Another rest run using a different route:
![]()
Quad-ROS-bot
Development platform for agricultural robots