 J Groff
J GroffThe focus of this project is a very low cost robotic platform that provides a test bed for a new model of machine cognition.
A purpose built micro cluster serves as the 'brain' and the BigSack deep K/V store was optimized for cluster operation.
The Robot Operating System Java version, is used as the main control bus.
For the maximum power and lowest cost, BLDC e-bike hubs which can also function as jumbo servos to provide articulating joints of industrial power were used.
The system uses a 24V electronics bus and a 48V propulsion bus with 5 and 12v buck converters to power the RPi's and Bosch BNO055 IMU. Unlike most robotics projects this one emphasizes multiple compact SBC processors with a high speed network rather than one massive, expensive, power-hungry boardset .
Using the current sensor bus, ROSCOE can:
Detect rising barometric pressure and verbally warn of storms
Roll through clouds of toxic gas to deliver live video feed
Detect unusual magnetic anomalies and verbally report
Detect seismic shocks and tremors to issue verbal warning
Detect rising temperature gradients and issue notification
Warn you of low battery and optionally attempt recharge
Warn of motor faults
Interface with dozens of advanced sensors with hot pluggable drivers including LIDAR
Warn of impending impact
Detect motion and take action if necessary
Interface to Internet or work standalone. Video and data feed from anywhere in WiFi range
Push a loaded trash bin to the corner, *before* the trash guy gets there
PHYSICAL DIMENSIONS AND SPECIFICATIONS
Length Overall: 24"
Width and Wheel Track: 16"
Height: 32" max.
Weight: Est 60-70 lbs.
Wheel diameter: 16"
Number of Wheels: 3, 2 driven, 1 360 degree passive castor
Top Speed: Est 35-40 MPH
Drive Type: Differential, IMU integrated
Power Bus: 48V/24V
Base OS: Linux/ROS
Microcontrollers: ODroid C1, Odroid C2, RPi 3, Arduino Mega2560 realtime
Network: Switched ethernet
Sensors: IMU, 2 cameras (front/rear), 2 forward ultrasonic sensors hi/lo
Est. Cost: ~$1200





 platis.solutions
platis.solutions
 cristidragomir97
cristidragomir97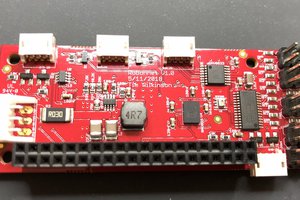
 Tim Wilkinson
Tim Wilkinson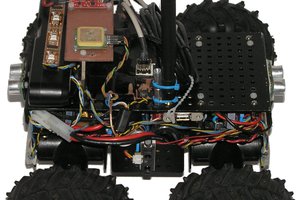
http://www.dfrobot.com/index.php?route=product/product&product_id=1125#.U7u5CPmSwm5
LIDAR! for $398.90! Which still seems like too much! I'll get one when its the same price as Kinect, $129.95 is my price point of choice!