 J Groff
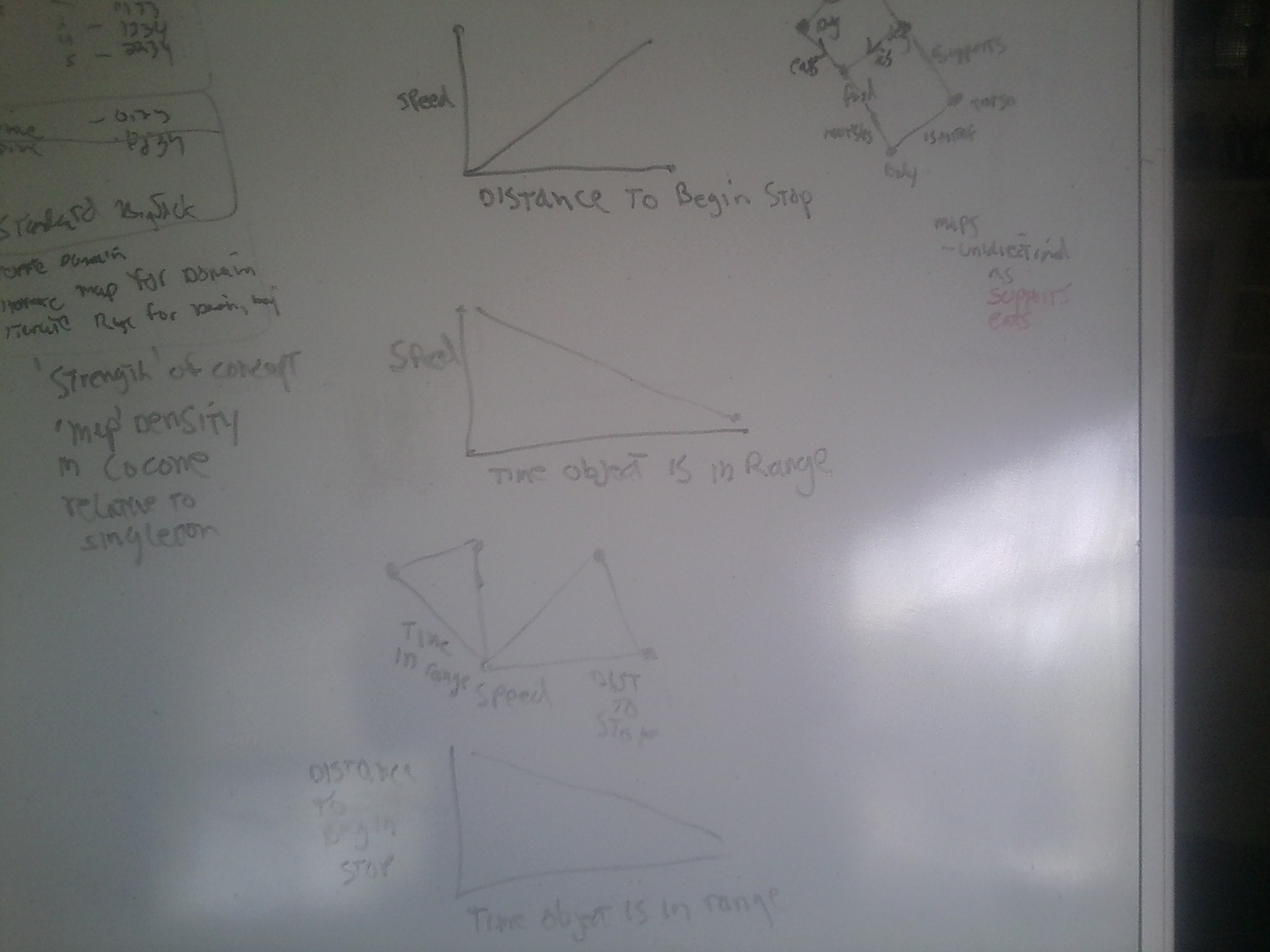
J GroffNow that all the ultrasonics are in place the time has come to determine their optimum use. Basically, the faster you are moving the less time you have stop and the less time something can be in range. The decision to halt forward momentum is based on how long something is in range vs closing distance which is all a function of speed. Its a classic time, speed distance calculation which as I see it becomes a linear programming problem in three dimensions. Using the speed axis as Y, the X plane becomes time something is in range and Z becomes distance. The attached photo shows the relationships via graph.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.