 J Groff
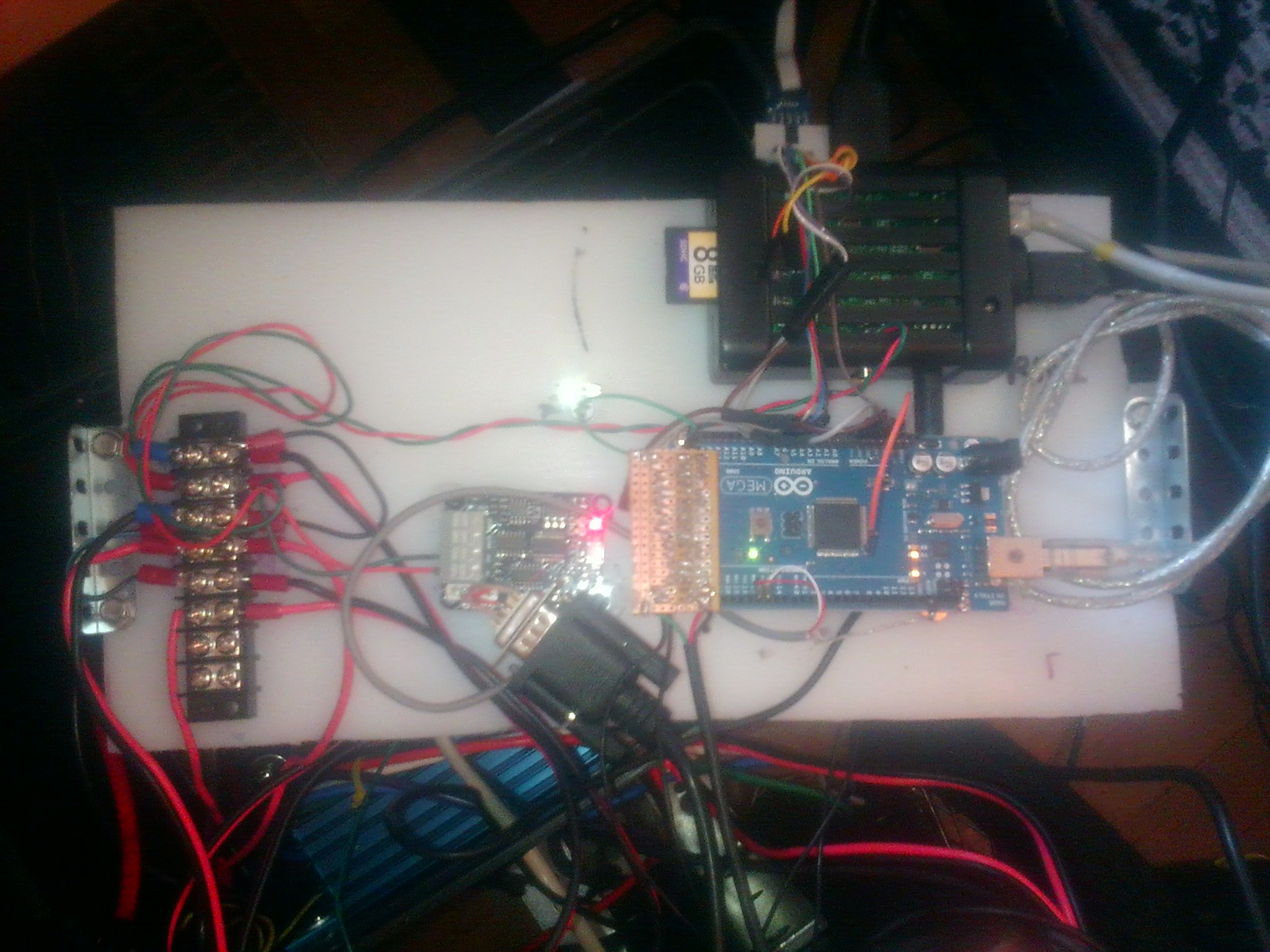
J GroffReplaced Max232 chip with multi-drop mux board to perform TTL to RS232 to talk to motor controller. Board also provides RS485 and USB for the addition of those devices if necessary. Cleaned up sound by adding mass and damping to speaker box, as much as possible in 2 inches sq. Wired peripheral board for Arduino to break out pins 22-56 and wired forward floor level ultrasonic to pin 22. Added M-code 300 and 301 to take US ping or start publishing of ultrasonic range via USB to RPi to ROS to decision making. Now ready to assemble rear box containing battery and RPi1/Arduino and MUX board. See attached pic:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.