 Dylan Radcliffe
Dylan Radcliffe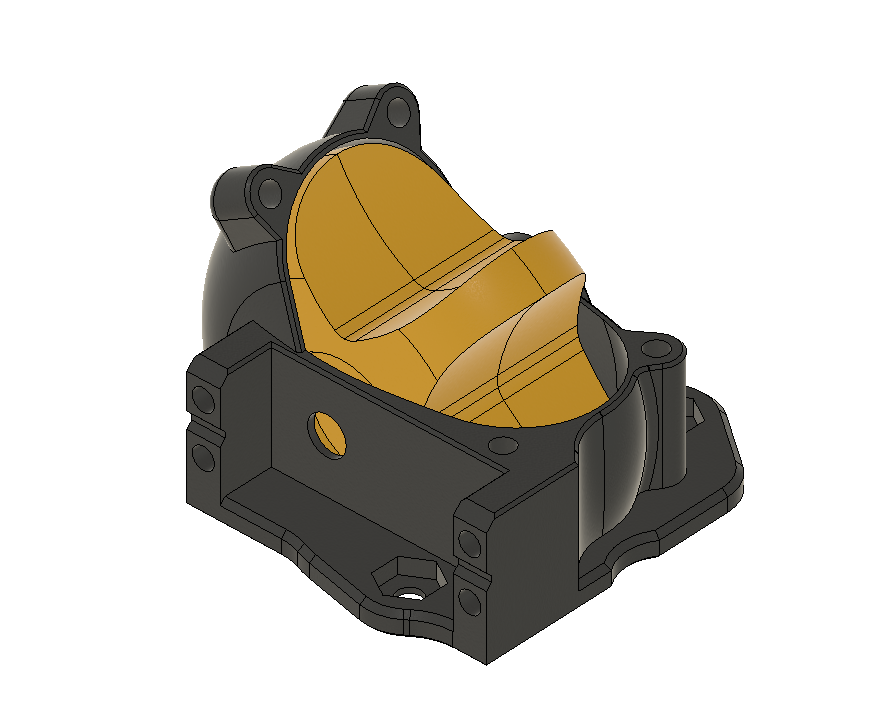 It looked great and was destined for success.... until it wasn't.
It looked great and was destined for success.... until it wasn't. Unfortunately the cheap continuous rotation servos you can order online don't throw a lot of torque. In my initial tests the wheel would pinch the seeds between the housing and the wheel and instantly stall. Big sad indeed.
Back to the drawing board! I was trying to avoid if at all possible using a gearbox to increase the torque of the motors. The servos don't turn that fast at top speed, and reducing that speed in exchange for torque didn't feel like a good option for a drone that needs decent control over the rate of broadcast. I ended up doing some research and found some cool videos of seed drills online. These designs eliminate any "pinch points" where the seed could be pinched between the wheel and the housing and instead lift the seeds out of the hopper and throw them out. Here's a video of one in action:
So I set to work putting a design together. I went with a slightly different wheel design (Looks cooler too!) that collects several seeds at once for broadcast and dumps them out of the back of the hopper.
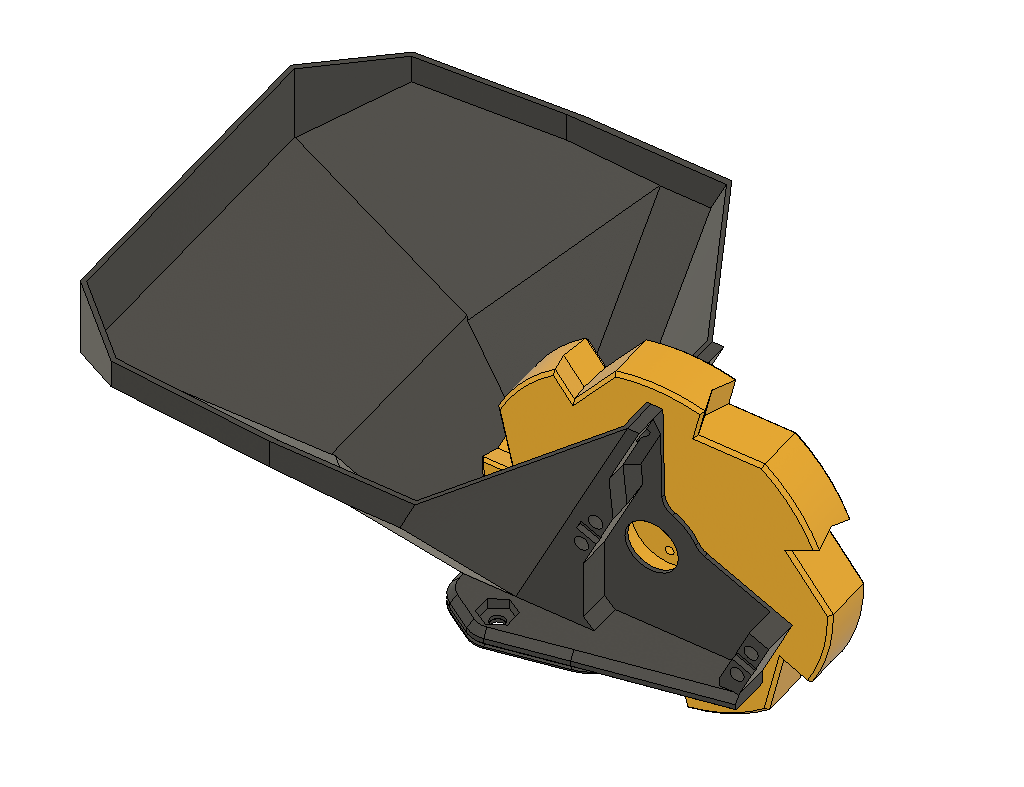 The size and design of the hopper still needs a bit of work, but currently it can hold ~700g of bird seed for testing.
The size and design of the hopper still needs a bit of work, but currently it can hold ~700g of bird seed for testing. That's the update for today! Stay tuned to see the design in action.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.