Individual Segment Description.
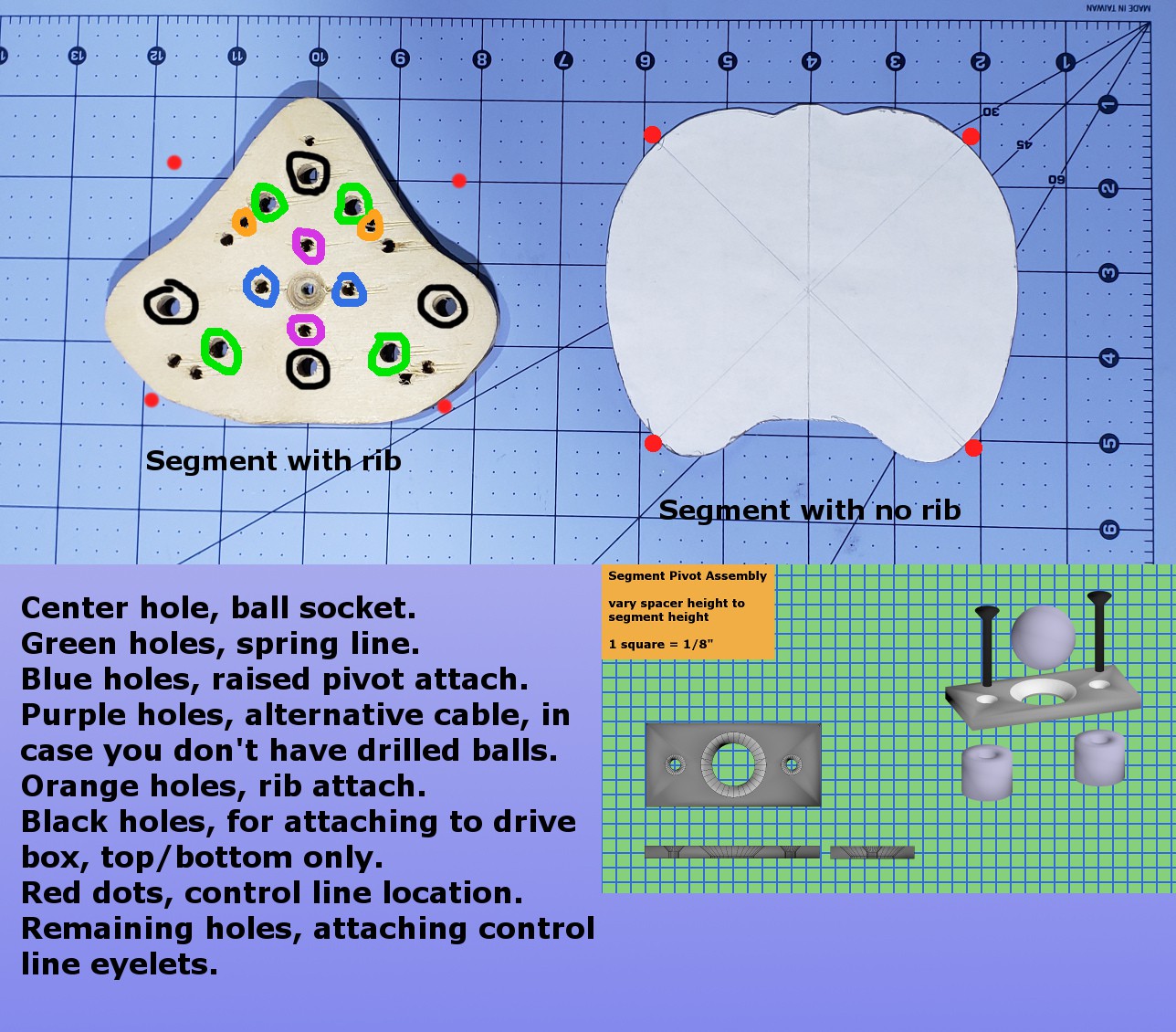
This illustration shows the holes I use in each of the segments. I use a straight countersink for the ball sockets so I can experiment with different balls sizes. I like 9/16" the best. I use delrin balls so I can drill a 1/8" hole in them. A cable is passed through this hole to bind all the segments in a group together. A single cable could bind both the upper and lower groups, but it makes it difficult to disassemble the robot components for whatever reason. Also if you use stainless steel balls and cannot drill them, you can pass a cable down and then up again along the purple holes in the illustration. The location of the spring holes doesn't seem to be super sensitive. I've seen some people use the control lines to hold the springs too. I like them separate so I can remove the control lines and the segmented component still works.

 txyz.info
txyz.info
 Mykolas Juraitis
Mykolas Juraitis
 Ian Charnas
Ian Charnas
 witchdoc
witchdoc