 Josh Gadeken
Josh GadekenI upgraded the RPi ZW to the new RPi Zero 2 to take advantage of the massive performance increase offered by the RP3A0 arm64 SiP [1]. Switching to an arm64 CPU and OS also means that my cumbersome cross-compilation environment is no longer needed! However, some ROS2 packages need much more RAM during build than the RPi Z2W has. My solution for this is to simply build the packages on a RPi 4, then copy the result to the Roomba's RPi Z2W. This is still easier and much more convenient than a cross-compilation system. An additional advantage of switching to an arm64 OS is that pre-built ROS2 binary packages are provided as an installation option [2].
[1]: https://www.raspberrypi.com/products/raspberry-pi-zero-2-w/
[2]: https://docs.ros.org/en/galactic/Installation/Alternatives/Ubuntu-Install-Binary.html
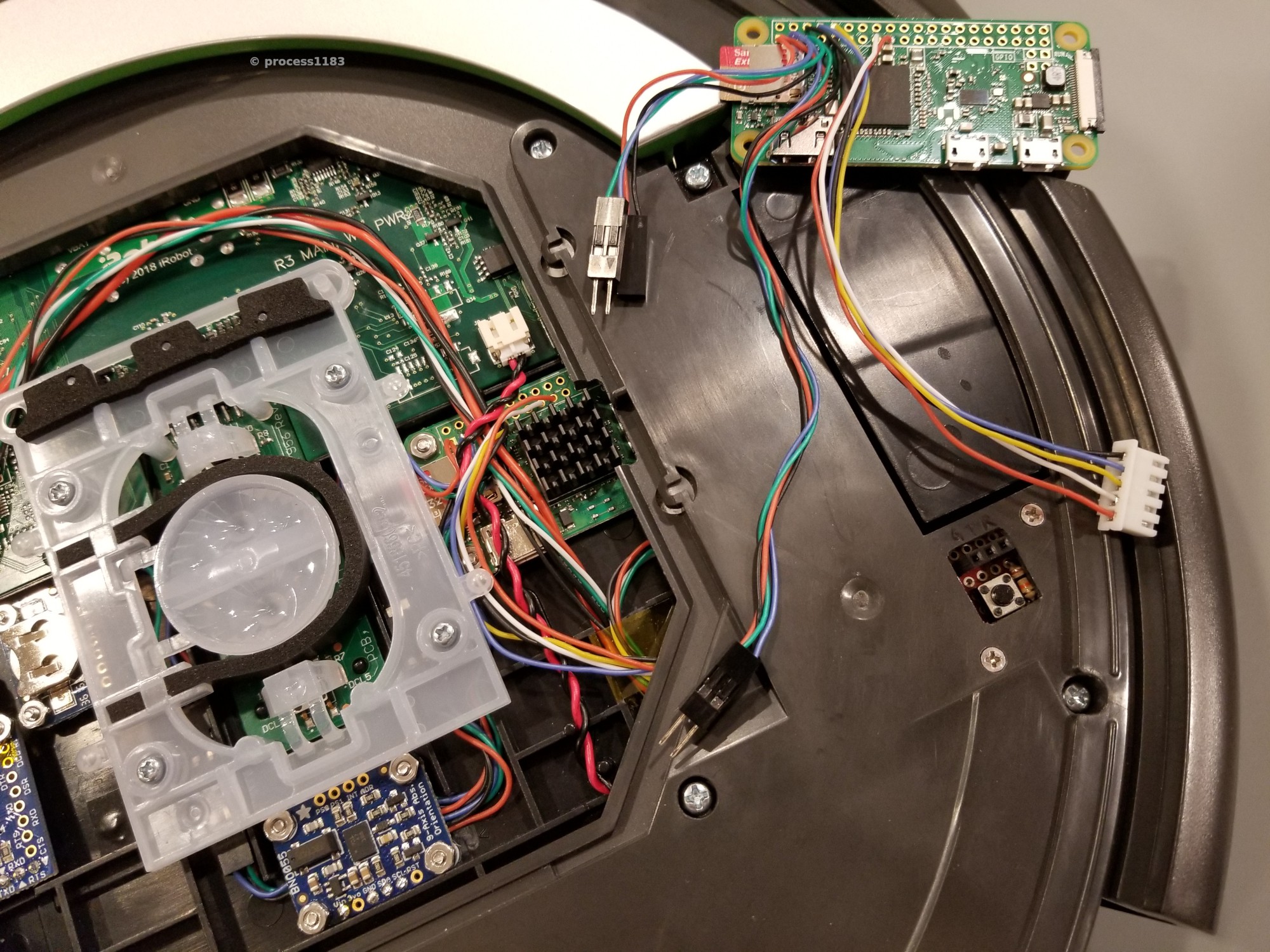
Photo shows the RPi Zero 2W with heatsink in the Roomba chassis and the old RPi Zero 1W in the top right.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.