 Josh Cole
Josh ColeDay 1
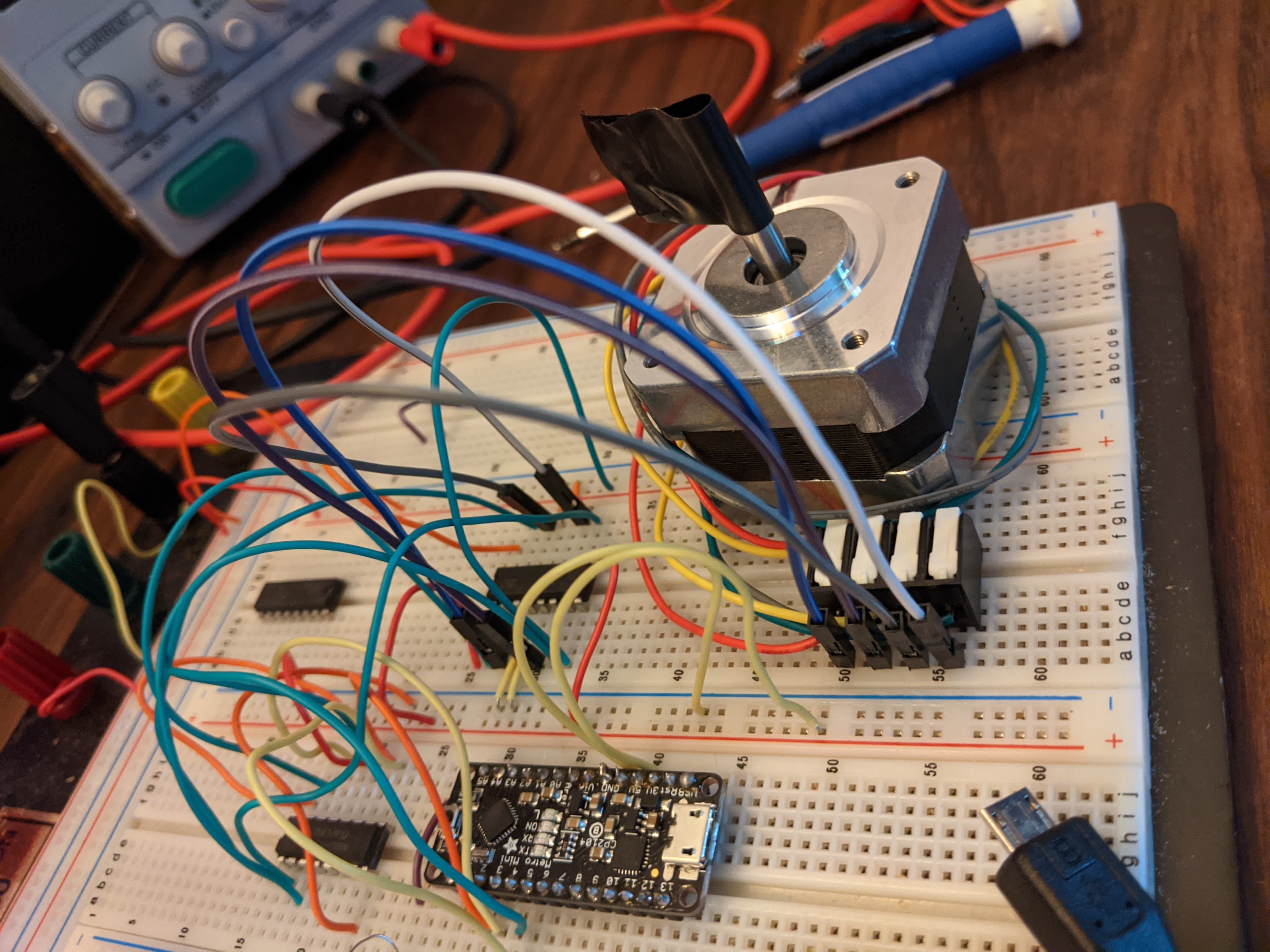
It's been about a day since I started working on this project, and I've made what I consider tremendous progress. I've written more than half of the code and wired up most of the components - this includes shift-register manipulation, a clean stepper motor interface, and some well documented helper methods. I still need to get the accelerometer hooked up and coded, but that should be relatively easy considering it's i2c. Then it'll be all about the algorithm. I'm happy to have the boilerplate out of the way.
Next up I'm going to spend some cycles working on the chassis. All code has been checked in to my project github repo, and the CAD files will similarly end up there.
Looking forward to having something pretty to show before too long!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.