0%
0%
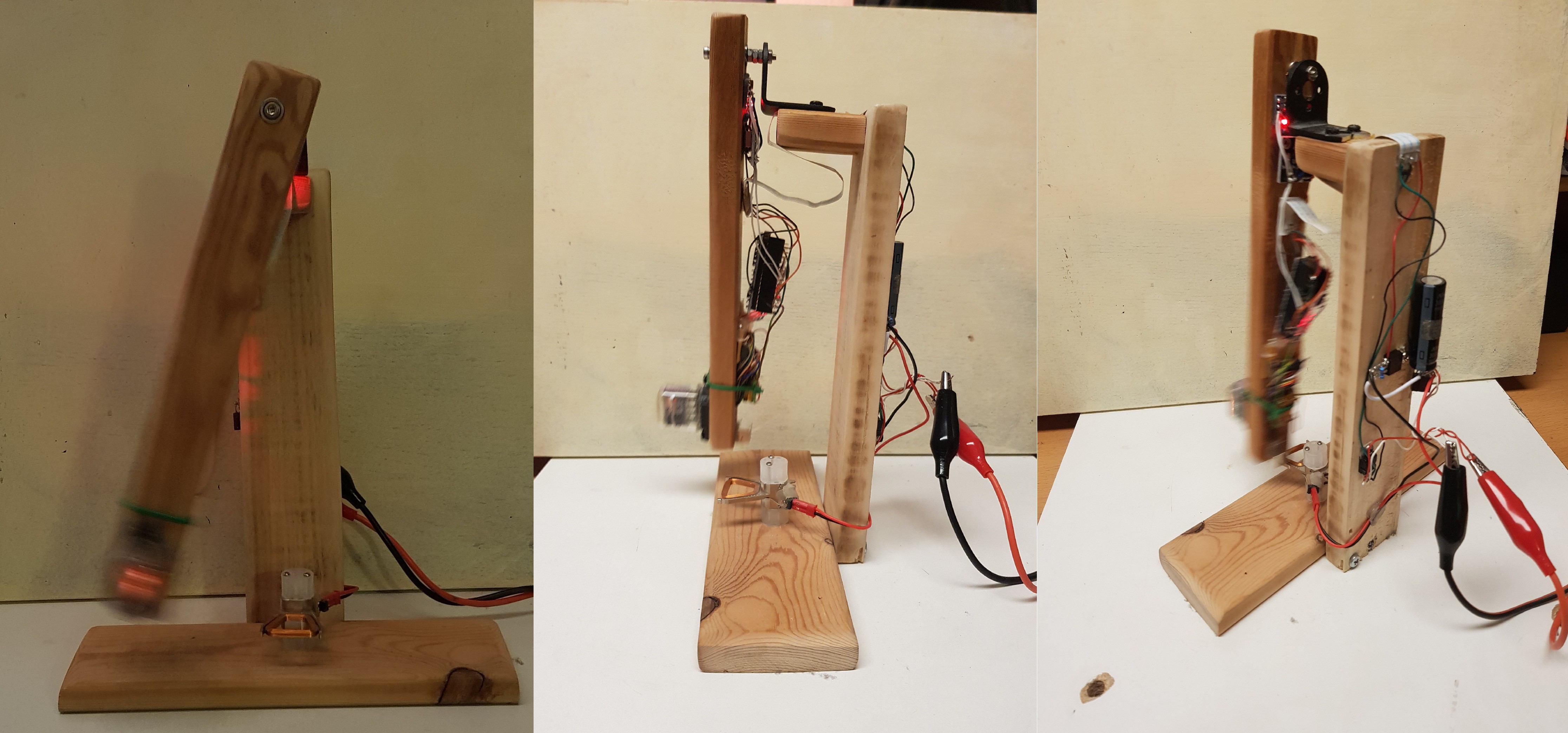
Nixie Pendulum Clock - Concept
A pendulum clock with a NixieTube (IN-12b) that plots the time in the air it passes.
 j
jBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests







 Xasin
Xasin
 loszelos
loszelos
 Marten Electric
Marten Electric
I do really love this project (being a clock fanatics !)
Thats's a pity that the PoV effect is so limited...