 schuhumi
schuhumiNo doubt that the Raspberry Pi was the Board bringing embedded Linux to hobbyists and tinkerers. In fact I was one of the very early birds purchasing one. As you might remember RS and Farnell got DDOS'ed very badly - it was an awesome feeling seeing the Rapberry gathering that much attention.
But at the moment I'm a bit fed up with it:
- Slow CPU
- Very limited RAM (remember that the first version had 256mb only)
- Power consumption is not particularly low
- Most annoying: A terrible hardware related I²C bug which makes communication with AVRs very hard. If an AVR can't handle an I²C event immediately it uses clock stretching, but this can screw up the Raspberry's I²C-bus hardware wise.
I checked all the boards supported by ArchLinux ARM and settled with cubieboard 2:
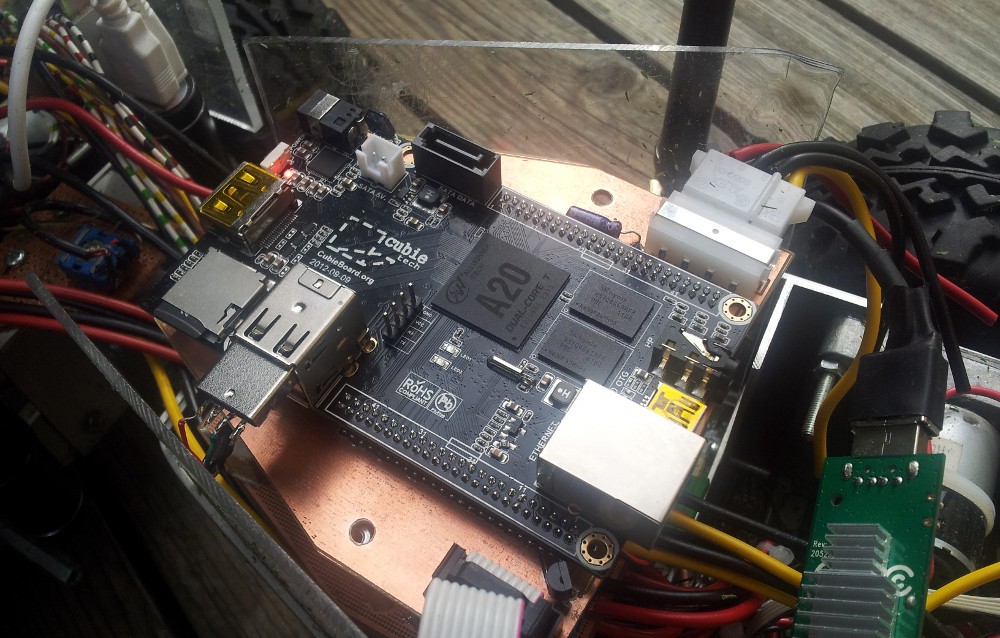
It sits on a home etched PCB and is only connected with 5V/GND/I²C
Some benefits relevant for this project:
- Proper I²C interface (!)
- Dualcore A20 Processor is very fast
- 1GB of ram
- Less power consumption
- 4GB internal flash. The cubieboard 2 (Class 4 µSD) already boots faster than the Raspberry Pi (Class 10 SDHC), and usage of the internal flash would reduce boot time even further.
- On shutdown the board actually switches itself off - this could be used as a power off signal for the power supply module
- Extension headers on the right side of the board (bottom)
Things that are not ideal (just minor flaws):
- The extension headers are 2mm, so prototyping boards are not an option
- No USB on extension headers
- To power it through the header one diode (D2) needs to be shorted ( http://www.iotllc.com/joomla/index.php/forum/baseboard/2-powering-the-cubie-with-the-baseboard )
So far I'm very happy with it!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Looks very nice :)
Did you look at the beaglebone black?
I know it has not as much juice as this, but it has 2 PRU's so it could handle i think all/most of the logic and motor driver internal.
But i could guess you have som good explanation :)
Thank you for your effort in sharing.
Kasper
Are you sure? yes | no
Yeah, I did look at the beaglebone black. The main reason why I favoured
cubieboard 2 is that the beaglebone has a PowerVR GPU, which is a pain in the
ass on the driver side (according to pretty much everyone on the internet). The
cubie has a Mali400 GPU, where open source drivers are in the works: http://limadriver.org/
I want autoCut to be open source in every aspect, and I might actually us the
GPU for a hi-res display (instead of classic LCD) - so I chose the cubieboard.
As for PRU's / Why I chose I²C + separate µCs:
- I wanted only a I²C connection from the embedded Linux computer to the rest of
the robot to make the computer exchangeable easily
- The first embedded Linux computer (before Raspberry Pi) was a very small
router (TL-MR3020: 400MHz Mips, 32MB Ram) with a bitbanged I²C bus being the
only reasonable interface for robot things
- All the modules should be independent so that they can be used in other
projects
- There are far more parallel things going on than one might think at first
glance. Thus using lots of CPU's makes sense
And: If I wanted to change it now, I'd have to redesign all the electronics and
rewrite all software - nope nope nope :D
And as you mentioned the cubie has more juice. For 15€ more you get twice the
cpu power, twice the ram, twice the flash, twice the usb.
So for me cubieboard is the winner clearly :D
[EDIT] And cubie has sata - although I don't need it right now
Are you sure? yes | no