 David
DavidTook a long break from the project, but I'm back now! With some fresh ideas for the project!
I've been thinking a lot about how I would like the end user to interface with the arm. Originally the idea was for the user would use a joystick to position the arm, hit a button to save as a way point and then repeat until the path was laid out. Which I think is okay, it's been done before that way, but imagining trying to position a 6 axis robot arm exactly how I wanted with 2 sticks seemed really unintuitive and potentially frustrating. What I'd really like to do, is have the user physically move the arm to the position that they want, and then click a button on the arm its self. (and have a menu on a LCD giving the user instructions kind of like a Prusa 3d printer) This way, the arm can be completely self contained, no need the be run by a computer, though I'd still like to keep that possibility open.
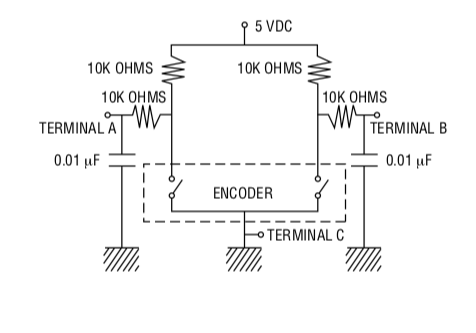
To make that method of control possible, I need to add some sensors and the ability to disable the motors/servos. Thankfully, the servo and stepper controllers have a disable feature built in! For adding a sensor to the axis controlld by stepper motors, I'm going to go with a relatively cheap rotary encoder meant for a dial. (PEC11R-4025F-N0024) In order to get it to read properly, I had to add a simple filter circuit (suggested in it's datasheet)
For the servos, instead of adding an external sensor, I'm going to try some that breakout their internal potentiometer. (Datan S1213)(ordered from Adafruit) They are fairly easy to use, I just need to run the analog feedback to the analog inputs on the microcontroller.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.