MWilk-bebop
MWilk-bebopDesign goal:
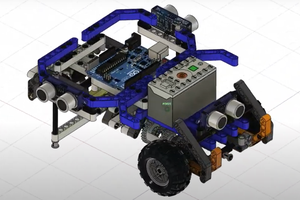
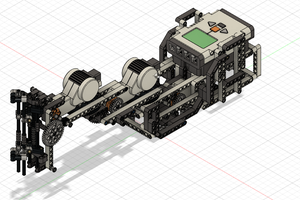
Our goal is to create a robot that travels in all directions, avoids obstacles and follows a prepared path. Because of this, we need to account for many design requirements and make many decisions about how best to design the robot.
Parts
To create this project we mostly used LEGO Mindstorms and Lego Technic parts, detailed list of all parts used can be found below:
| 2Y0A21 Distance Sensor | 2 |
| Arduino Uno | 1 |
| Axle 10 | 7 |
| Axle 12 | 37 |
| Axle 3 with Stud | 9 |
| Axle 4 | 8 |
| Axle 6 | 6 |
| Axle 7 | 12 |
| Axle and Pin Connector 3L | 8 |
| Axle and Pin Connector Angled #1 | 8 |
| Axle Connector 2L | 16 |
| Axle Connector Rubber | 16 |
| Axle Connector with Axle Hole | 16 |
| Battery Pack | 3 |
| Bluetooth Module | 1 |
| Bush | 150 |
| DC Motor | 4 |
| Gear 40 Tooth | 8 |
| Gear Worm Screw | 4 |
| HC-SR04 Distance Sensor | 4 |
| Liftarm 1x11 | 3 |
| Liftarm 1x15 | 25 |
| Liftarm 1x3 | 2 |
| Liftarm 1x5 | 2 |
| Liftarm 1x7 | 2 |
| Liftarm 1x9 | 24 |
| Liftarm 2x4 L | 8 |
| Liftarm 3x5 L | 78 |
| Mecanum Wheel | 4 |
| Pin Connector Perpendicular Long | 6 |
| Pin Double with Axle Hole | 10 |
| Pin Long with Stop Bush | 1 |
Percentage of lego parts is 96.08%.
Documentation
The documentation of our entire project can be found among attached files.