 Naman Pushp
Naman Pushp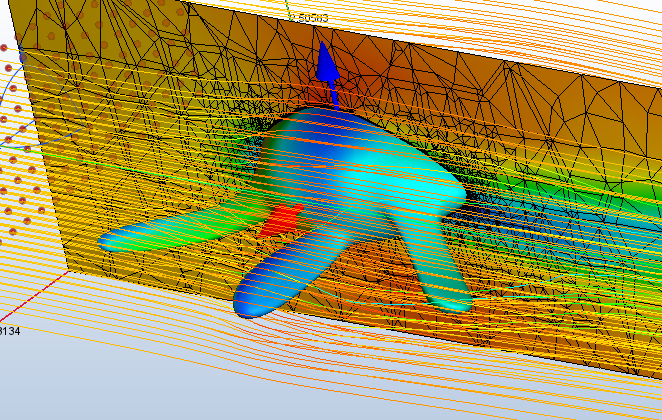
Background
When the project first began, I was only aware of two drone types - fixed wing and multicopter. Although fixed wings were far more common for more sophisticated drone delivery services, multicopter designs were seeing some use in shorter range deliveries. Since the infrastructure for fixed wing drones is very high, requiring either a long runway or some kind of specialized launching system. Therefore, despite the massive range advantage of fixed-wind, the accessibility of multicopters led us to choose that design.
Design Process
The shape for this drone was quite unconventional, and didn’t seem to follow the design philosophies of any existing drone. The main difference is the usage of this drone is not like other drones. Since a majority of the movement is going to be in one direction, the drone only needs to be aerodynamic in one direction, therefore, the body was modeled after a teardrop, to ensure maximum aerodynamic efficiency. The supports for the propellers are roughly modeled after airplane wings, to further streamline the body.
The design used 6 wings, as based on our requirements, a quadcopter design would not have provided enough thrust, and an octocopter design would be too expensive to make.
Simulations
We conducted a simple steady-state wind tunnel simulation on the body to test the viability of such a design. Overall, the simulation showed promising results, however we were unable to get a transient state simulation complete before we decided to pivot to a VTOL design
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.