 deʃhipu
deʃhipuIn the previous versions of this robot I experimented with the mechanical leg segments made out of PCB, simply included in the design, with mouse-bite holes so that you can break them off easily. That made sense before there was easy and cheap access to laser-cutting: after all, the PCBs are being cut with a CNC router anyways, why not take advantage of it. Unfortunately today it makes less sense, as PCB fabs usually want you to pay extra for multiple projects in one design, and such a leg segment will count as a separate project for them. Laser cutting parts make more sense and look better. And the material can be less toxic.
On the other hand, the PCB legs had one big advantage: you could put components on them. In particular, you could put switches at the ends of the legs, to give the robot a primitive sense of touch. Then you can program it to stop and turn around when it reaches the edge of your desk. Of course you need switches with very light springs in them, and relatively short travel — turns out that the switches that are normally used to detect if an SD card is inserted are perfect for this.
So I designed an alternate leg segment, made of PCB, with a switch footprint at the end, and some traces going up to the knee. It won't be included in the main body PCB of the robot, I will simply order it as a separate order. It looks like this:
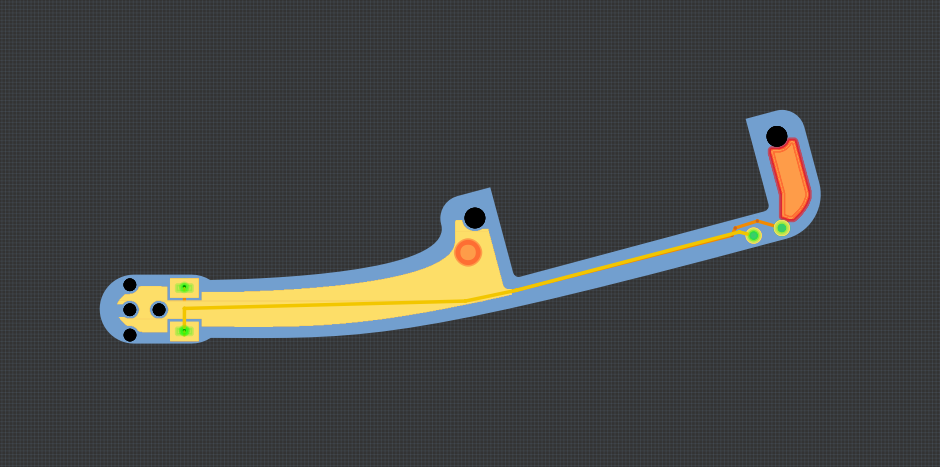
Of course this is completely optional, but I think it's a nice option to have.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.