 FabLab München
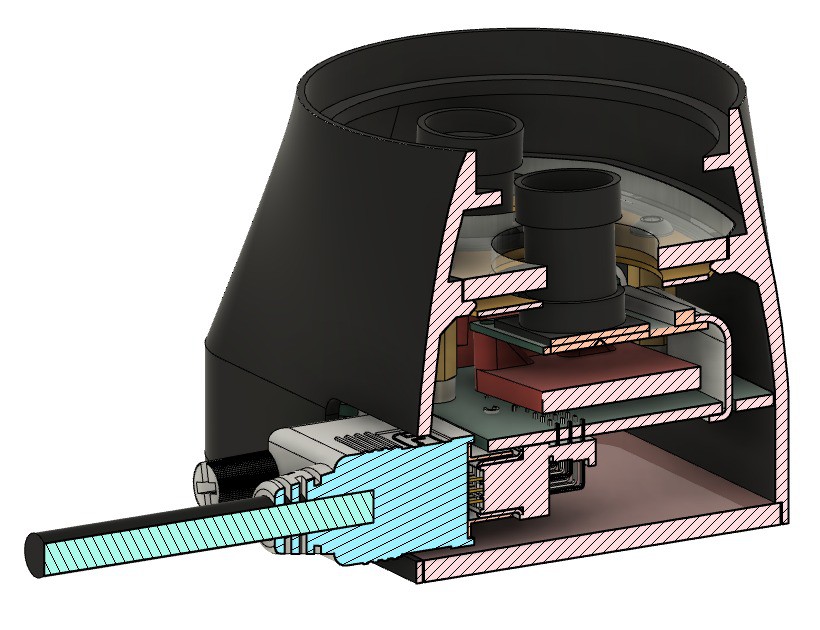
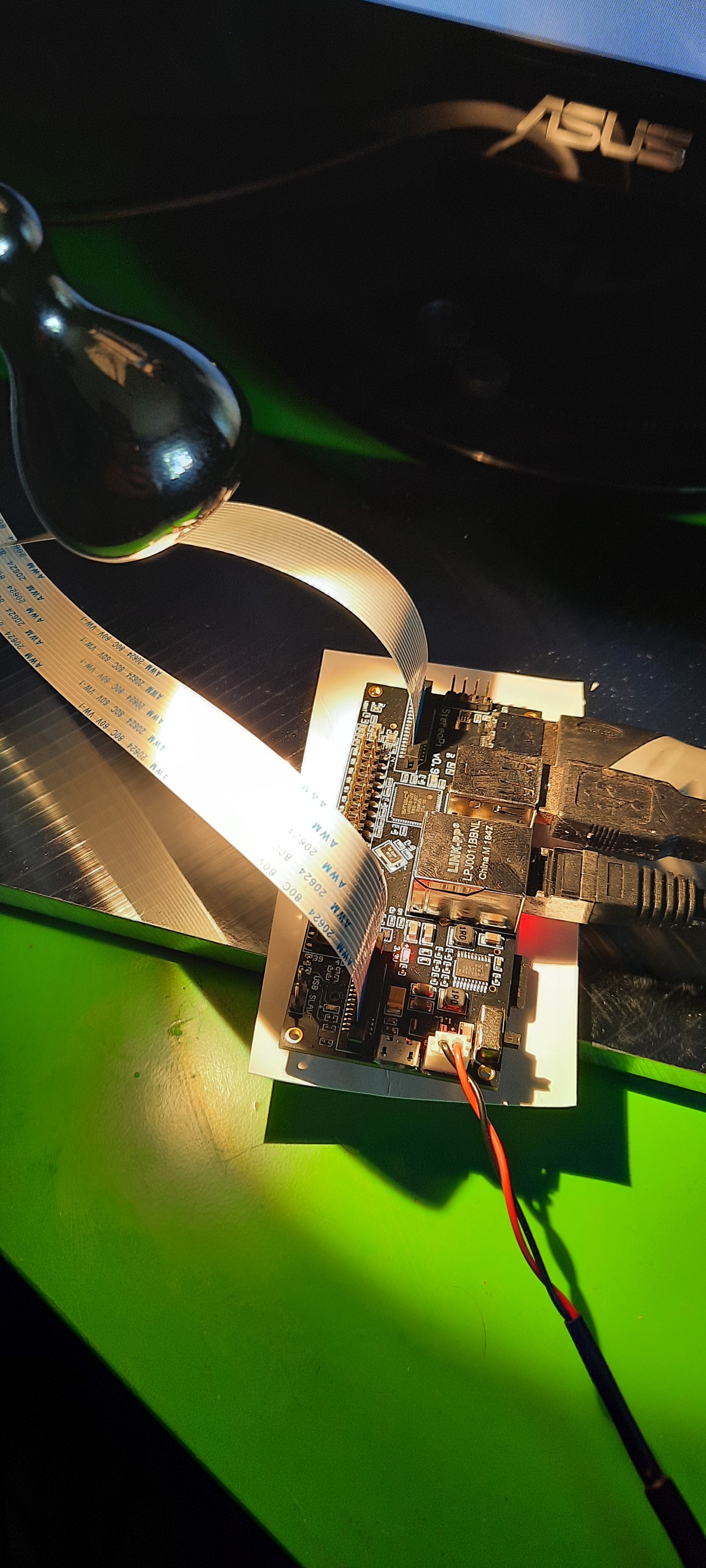
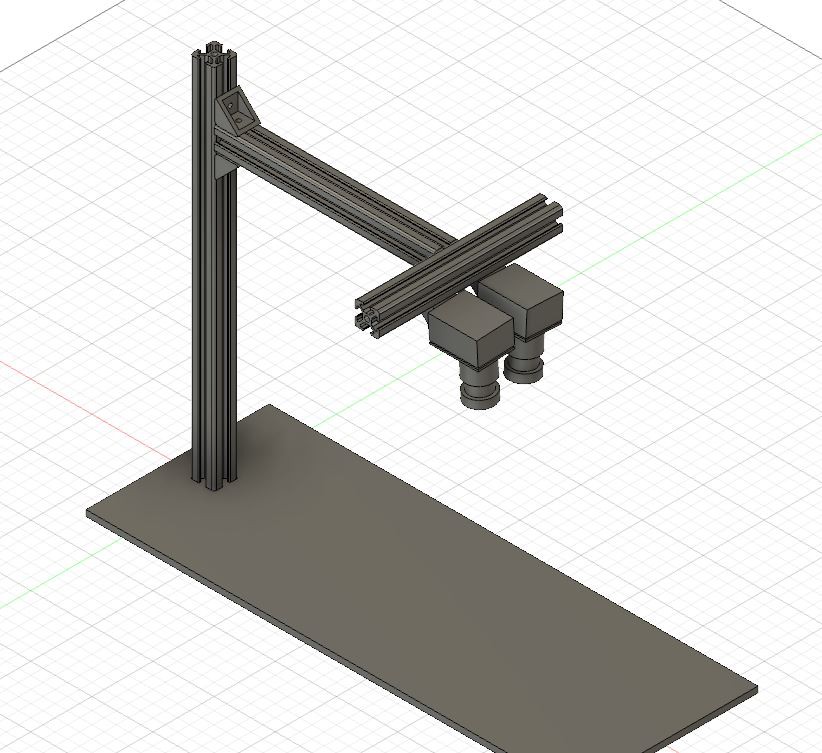
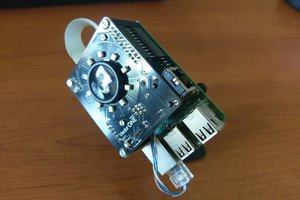
FabLab MünchenStereo Ninja is a dual camera setup for stereoscopic microscopy. The heart of the project is a Raspberry Pi. To be precise, you need a Raspberry Pi 3 or 4 Compute Module and a breakout board that gives you access to both MIPI CSI camera input ports the chip set offers, but is not available at the standard Raspberry Pi 3 or 4 versions. Then of course, you need 2 RaspberryPi-compatible cameras with suitable lenses. Our microscope setup is meant for electronics work, so we chose lenses that do not give you that much of a magnification, but permits an adequate lens-object distance for conveniently working under it. Then of course, you need a 3D monitor for displaying the stereoscopic view on your workpiece. We chose a fast 3D-capable gaming monitor with shutter goggles. Finally, a nice stand for you camera is needed.
All these components allow a selection from a variety of choices. We'll try to come up with a good recommendation on what you would want to get, but it is also possible to mix and match these parts (makes sense e.g. when you already own e.g. a 3d monitor). We'll try to list many of these combinations and document how to get them working. If you try a new lens/camera/board/monitor, let us know how it worked for you!
Here's Uli giving you a quick demo of the Stereo Ninja:
Roadmap
- Proof-of-Concept: StereoPi + Raspi3 Compute Module: real-time video stream to 3d monitor; done
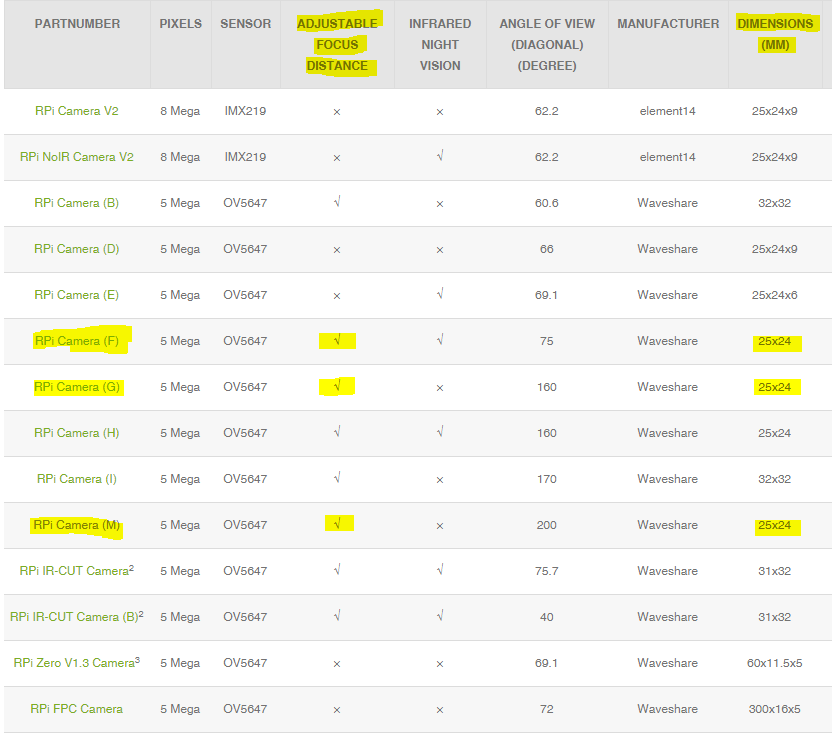
- Selecting suitable lenses; done (but will look at more later)
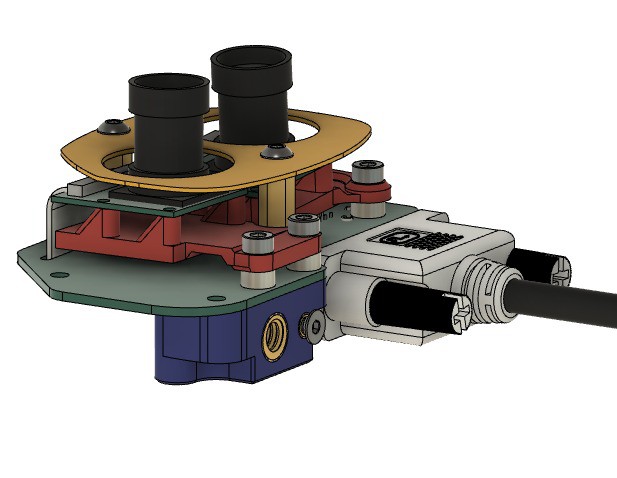
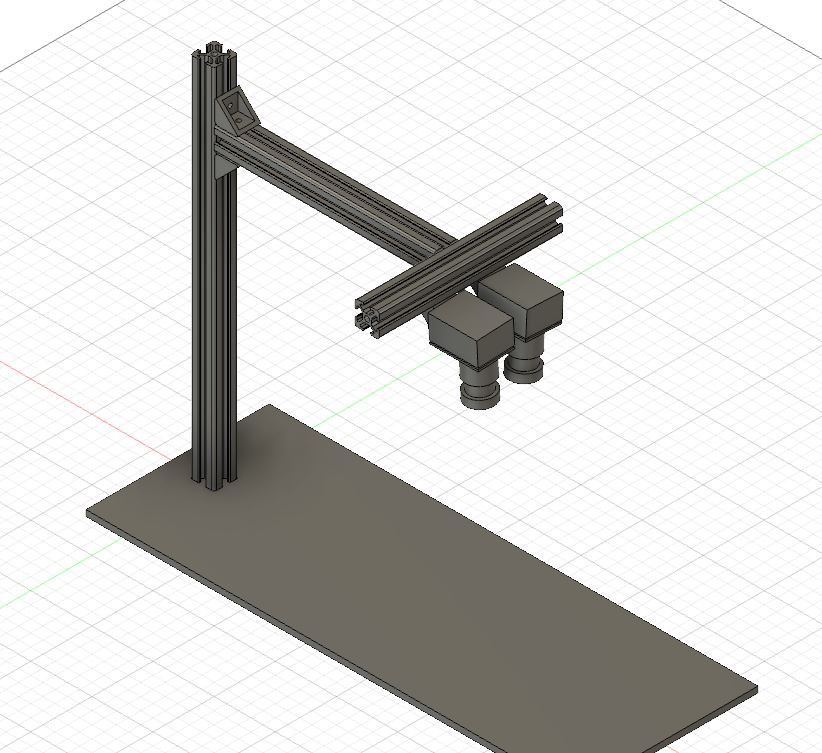
- Dual-camera mount; done (3d printed version later)
- Integrate lighting into camera mount (we use an IKEA JANSJÖ for now, which works nicely)
- Tests with CM4 (Raspi4 Compute Module), work-in-progress
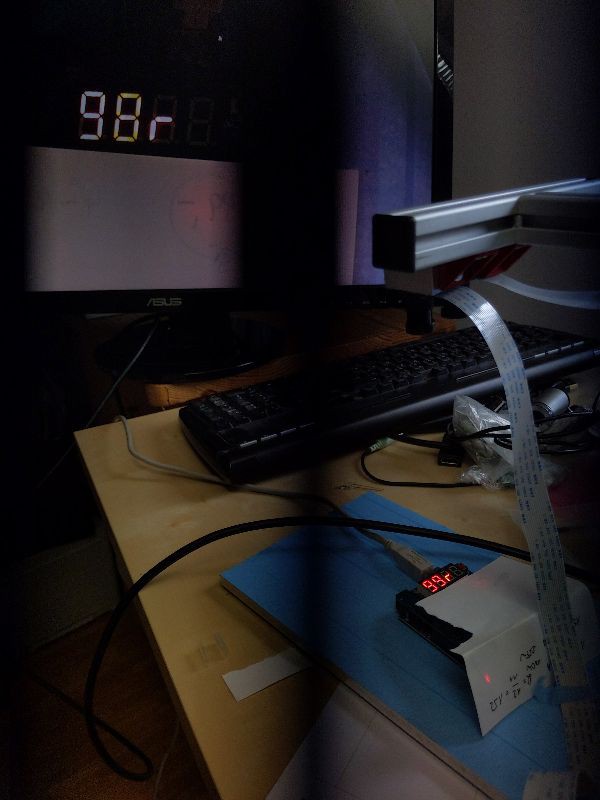
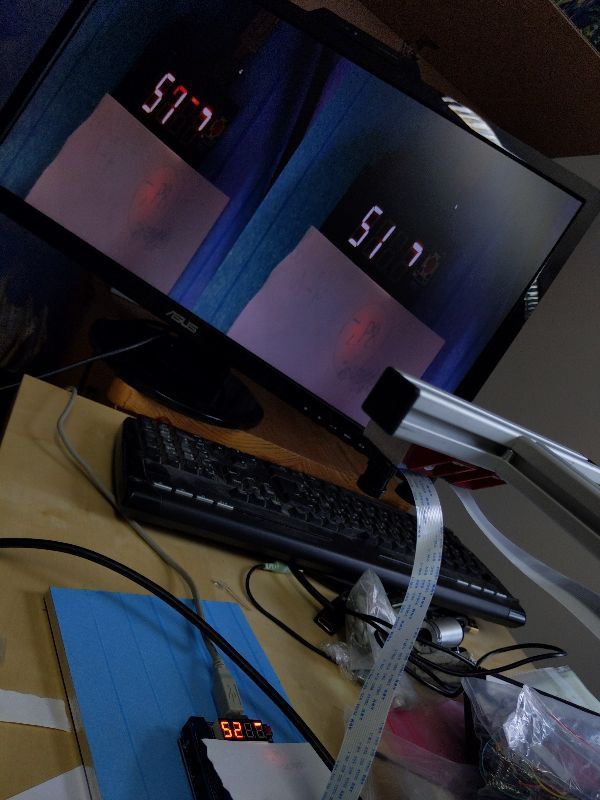
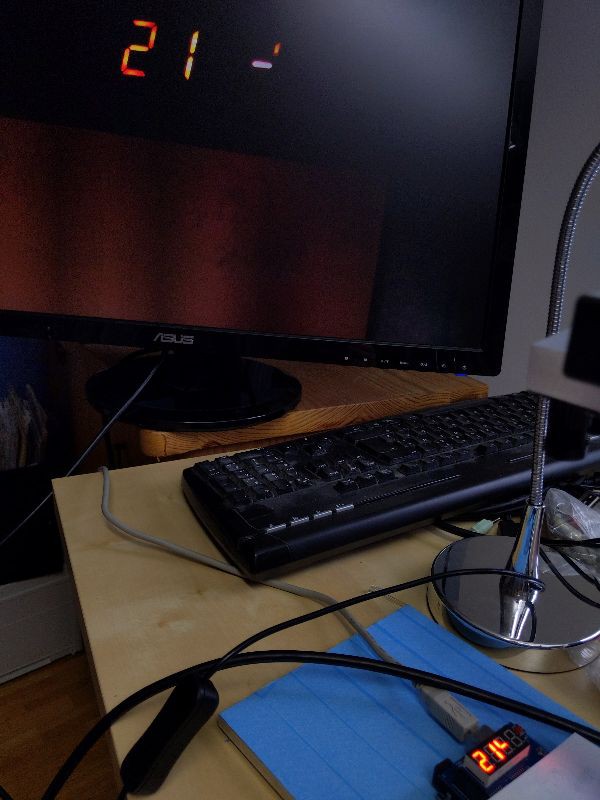
- latency optimization: test different software setups, measure latency
- software: digital zoom
- software: enable streaming/recording
Future feature ideas:
- Support standard (non 3D) monitors by generating the signals for the shutter glasses on the Raspberry Pi
- smart zoom: zoom into region where your solder tip or test lead points to
- enable video overlay (display PCB info like BOM directly on screen)
- Kicad integration
- AR mode (e.g. for part placement on PCBs, highlighting tracks, etc)



















 Robert Gowans
Robert Gowans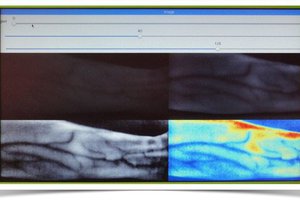
 Myrijam
Myrijam
 Mike Rigsby
Mike Rigsby
 Eugene
Eugene
This question is kind of an off-chute of this topic but it uses all of the elements in a different way. I am blind in my right eye. I, therefore, have no stereoscopic vision. this fact has bothered me to no end since my accident. Not having stereoscopic vision is more than not being able to watch 3D movies. You lose all depth perception. This makes soldering not quite impossible but close, and don't park behind my car if I need to backup.
I have always wondered if I used two cameras with separation and both were focused on the same point, and you alternately strobed the video output onto a single screen if my one eye could interpret a stereo image from the two different perspectives. I had stereo vision all of my life, prior to my accident. It might be that my brain is still capable of interpreting perspective information, an ability it once possessed.
Using only one eye to receive alternating angular information, like moving video frames that capture motion, would a stereo alternating image just flicker weirdly, or could my brain correctly interpret my lost depth perception? Would frequent training help? These are questions I have asked myself for years. I even posed this question to the MIT Media Lab, with no response.
Your project intrigued me for two reasons. I would love to have a stereo microscope, and I would love to be able to use it.