 Max.K
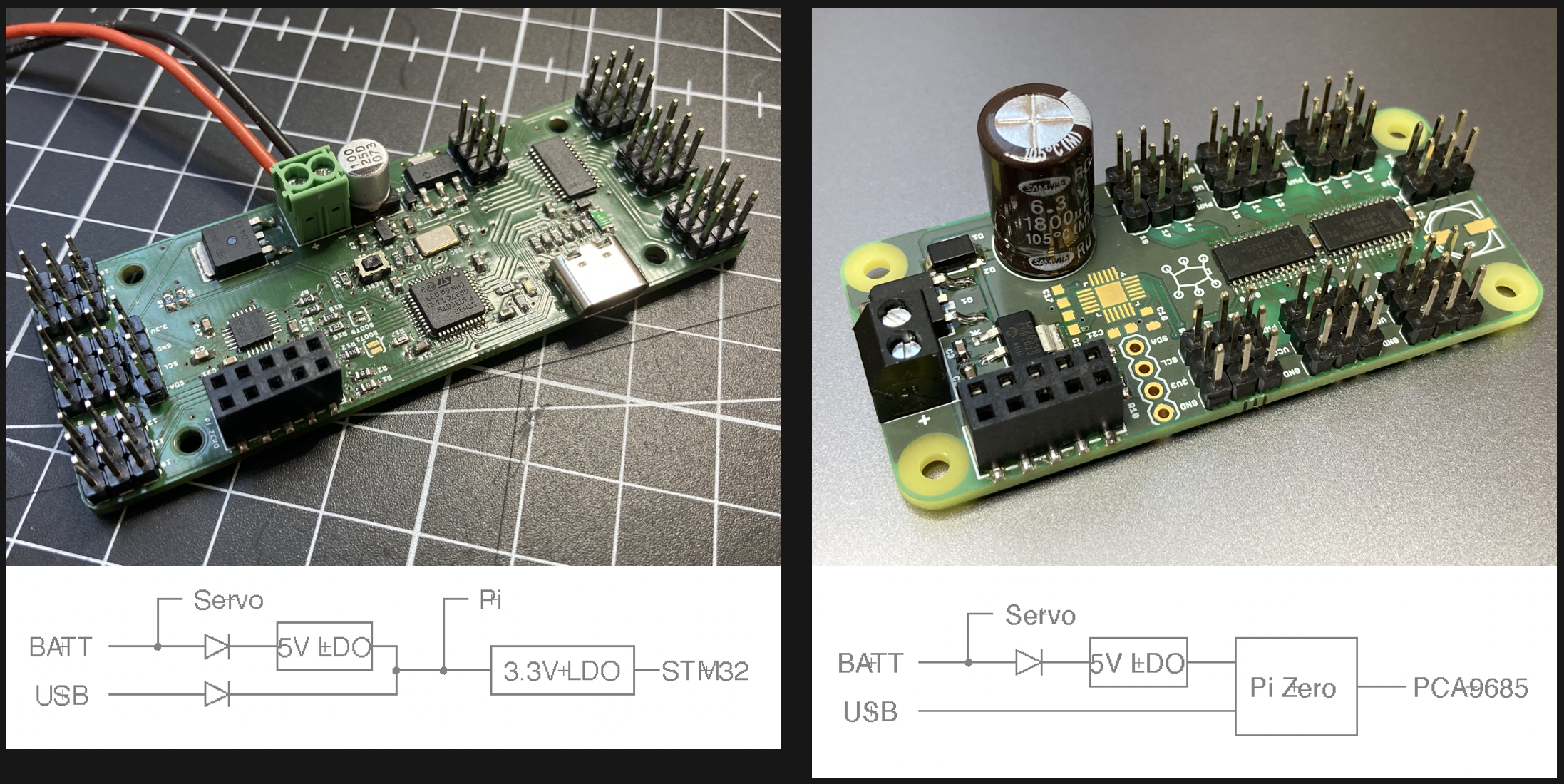
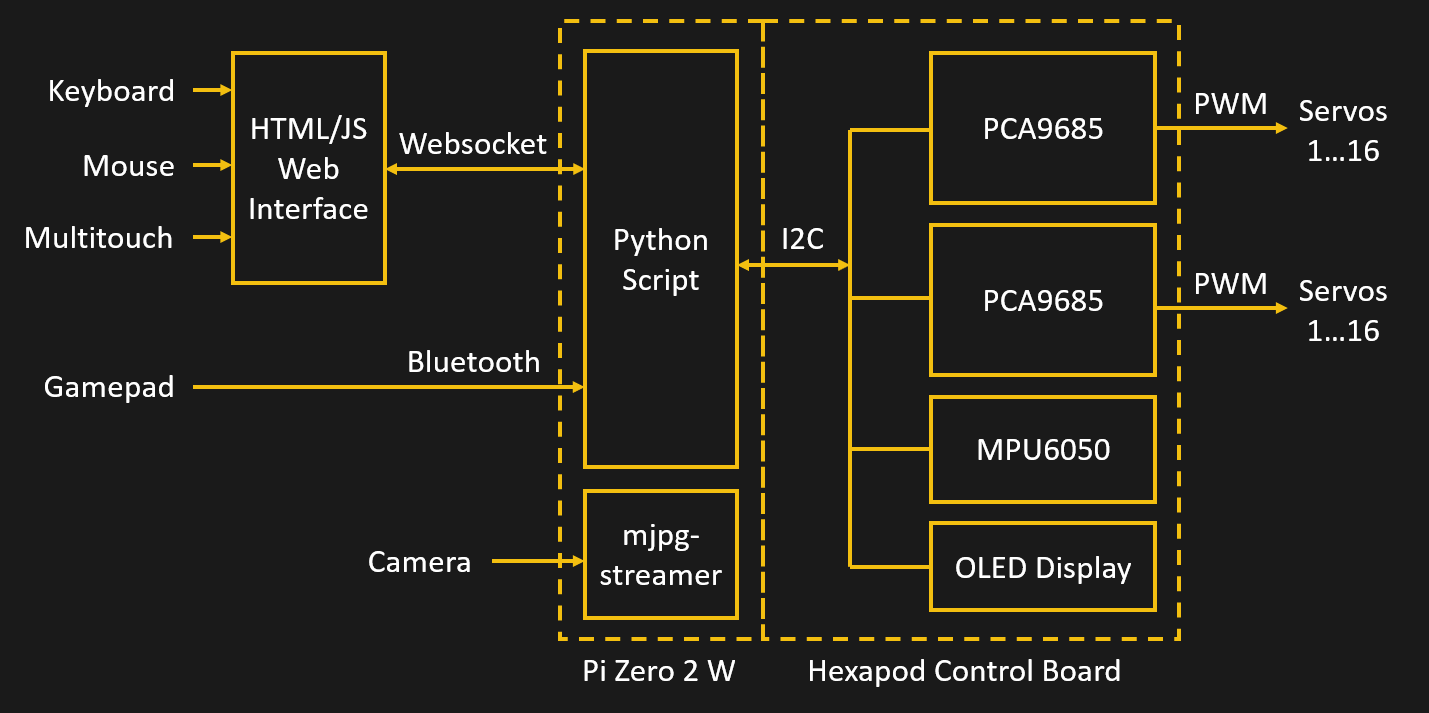
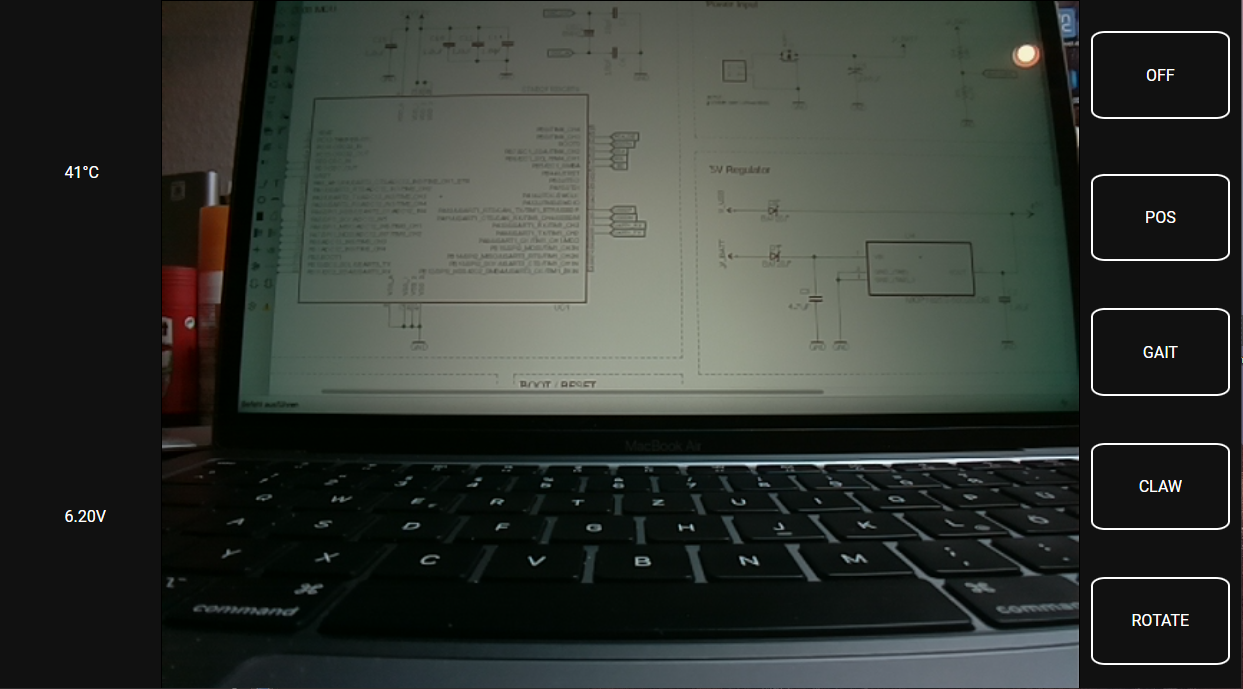
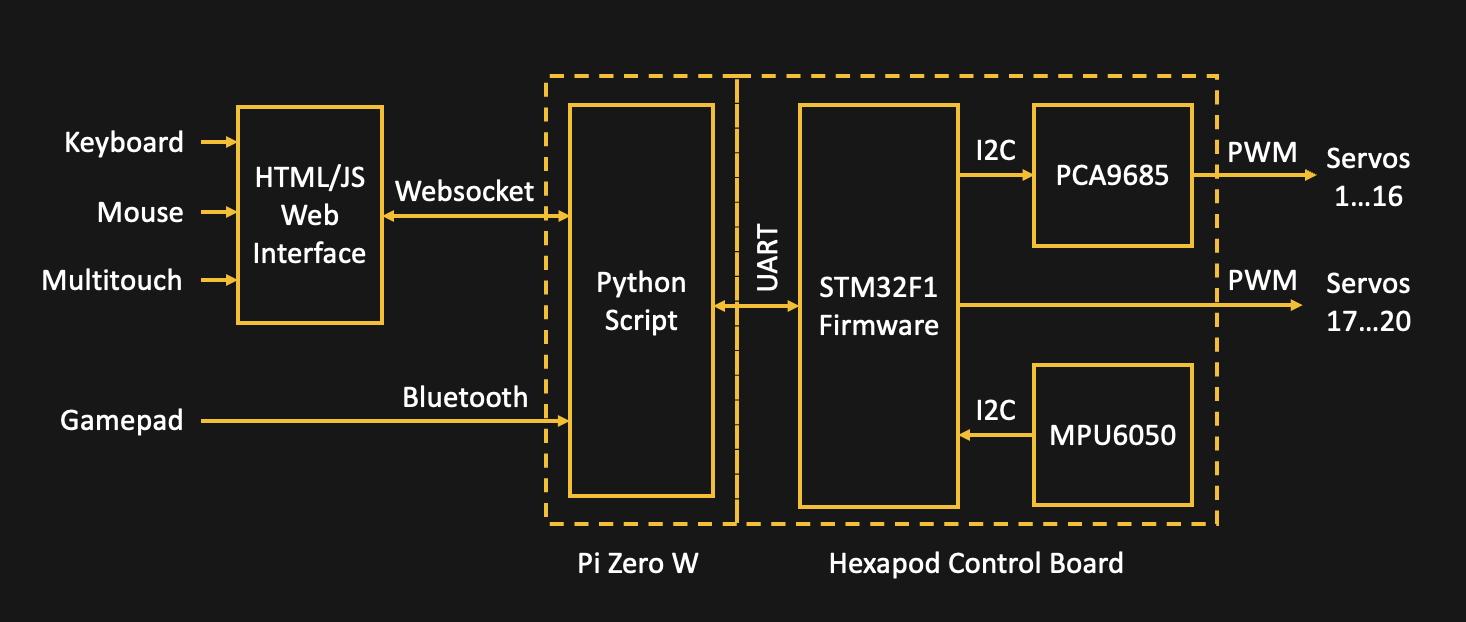
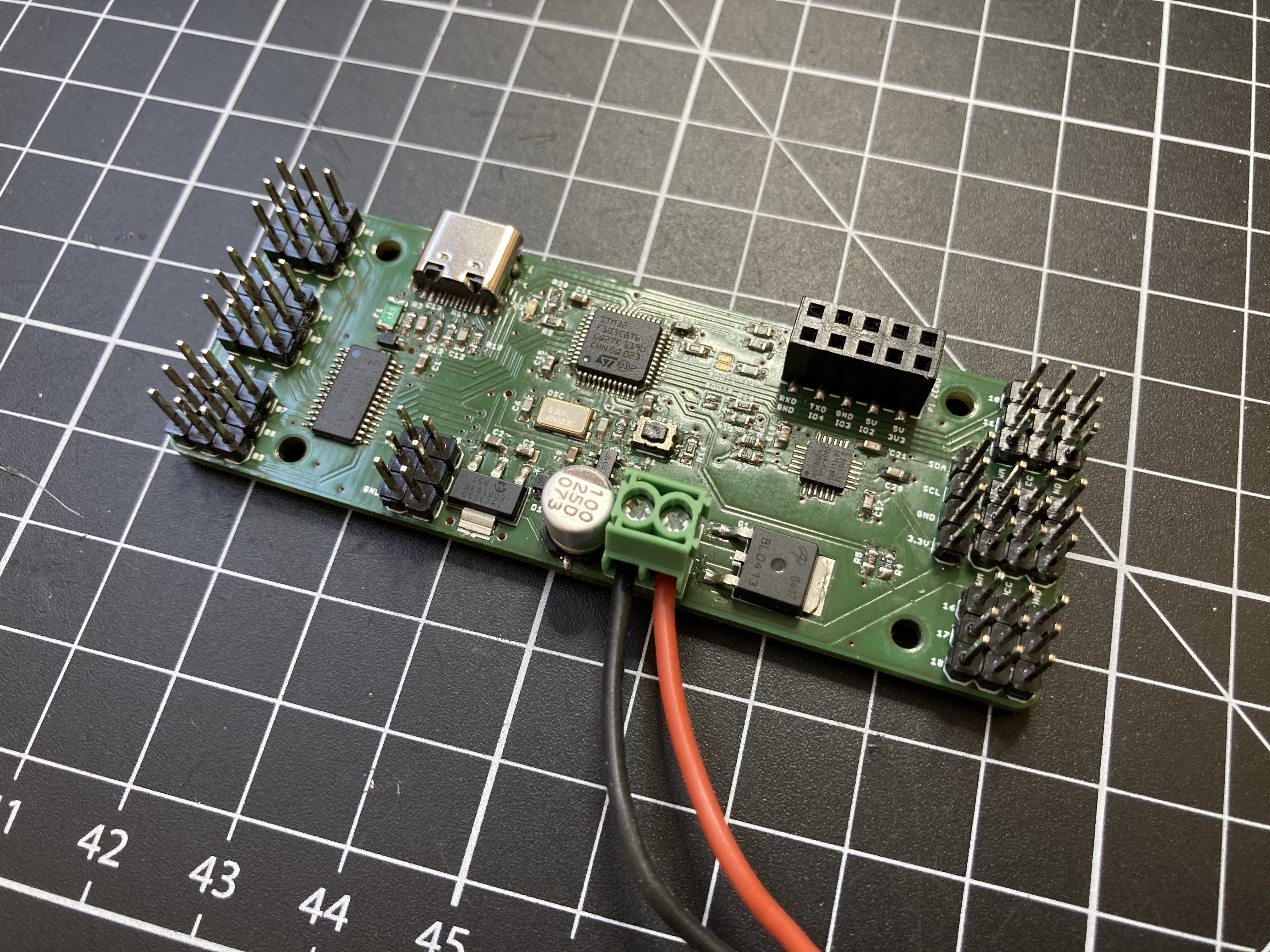
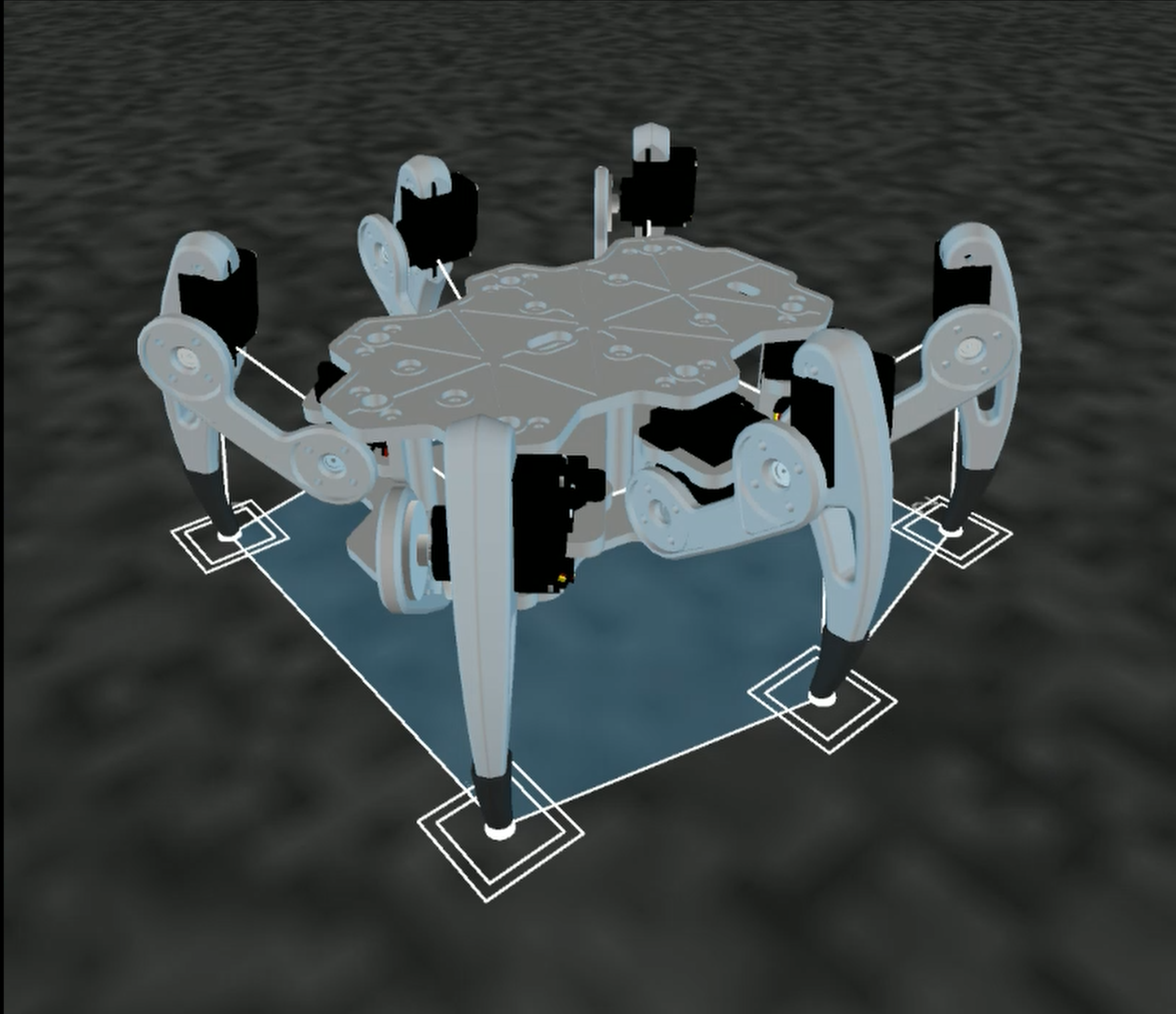
Max.K- An STM32F103 does the heavy lifting when it comes to making the robot walk. It calculates locomotion, inverse kinematics, body rotation/translation and finally drives the servos. With a simple serial protocol, commands can be sent to control the robot directly. The serial interface is also what the Raspberry Pi Zero W is connected to. It is running an improved version of the software created for the wheeled Zerobot, which hosts a web interface for mouse and touch controls. On top of that, wireless gamepads are supported via pygame.
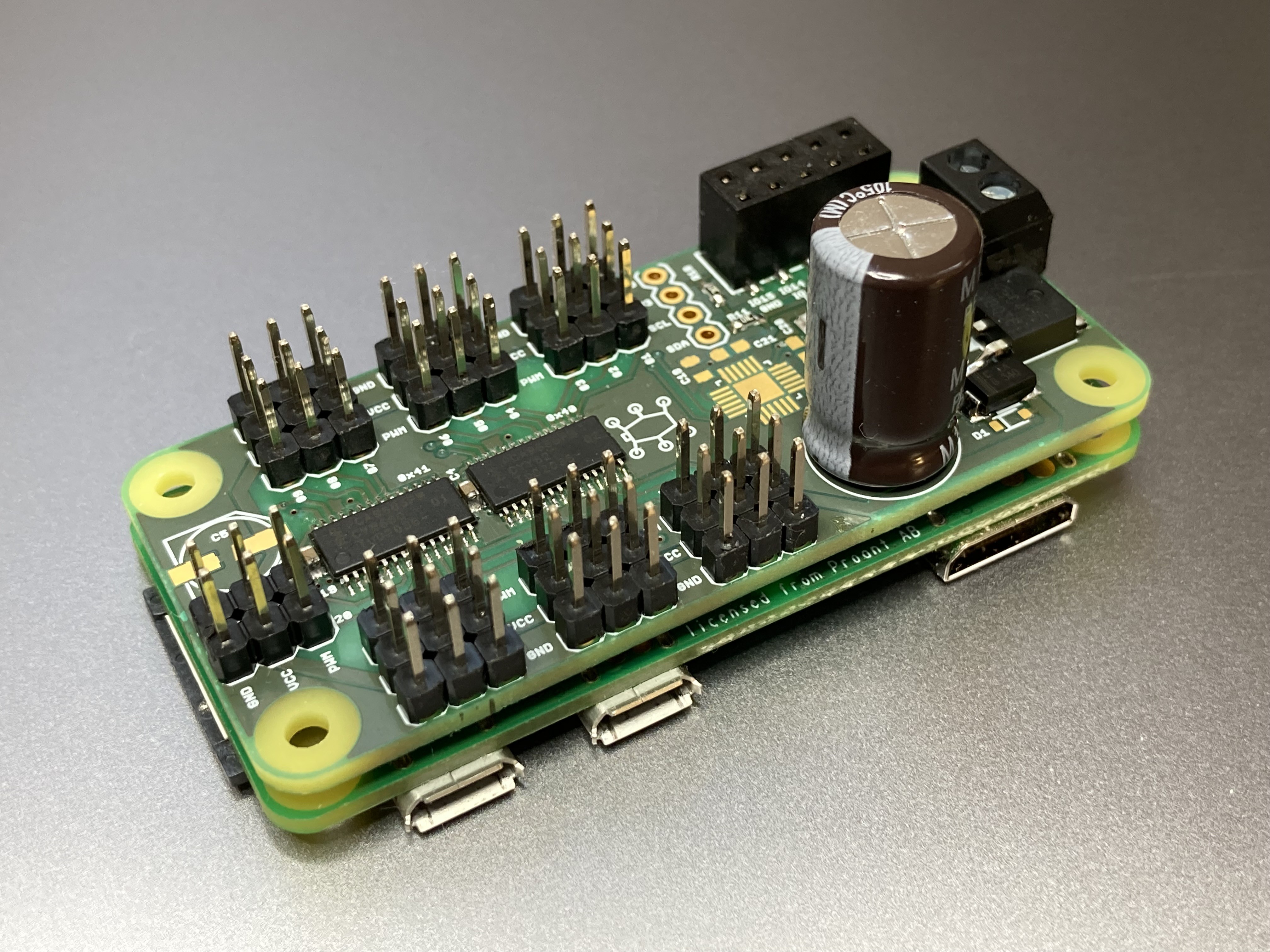
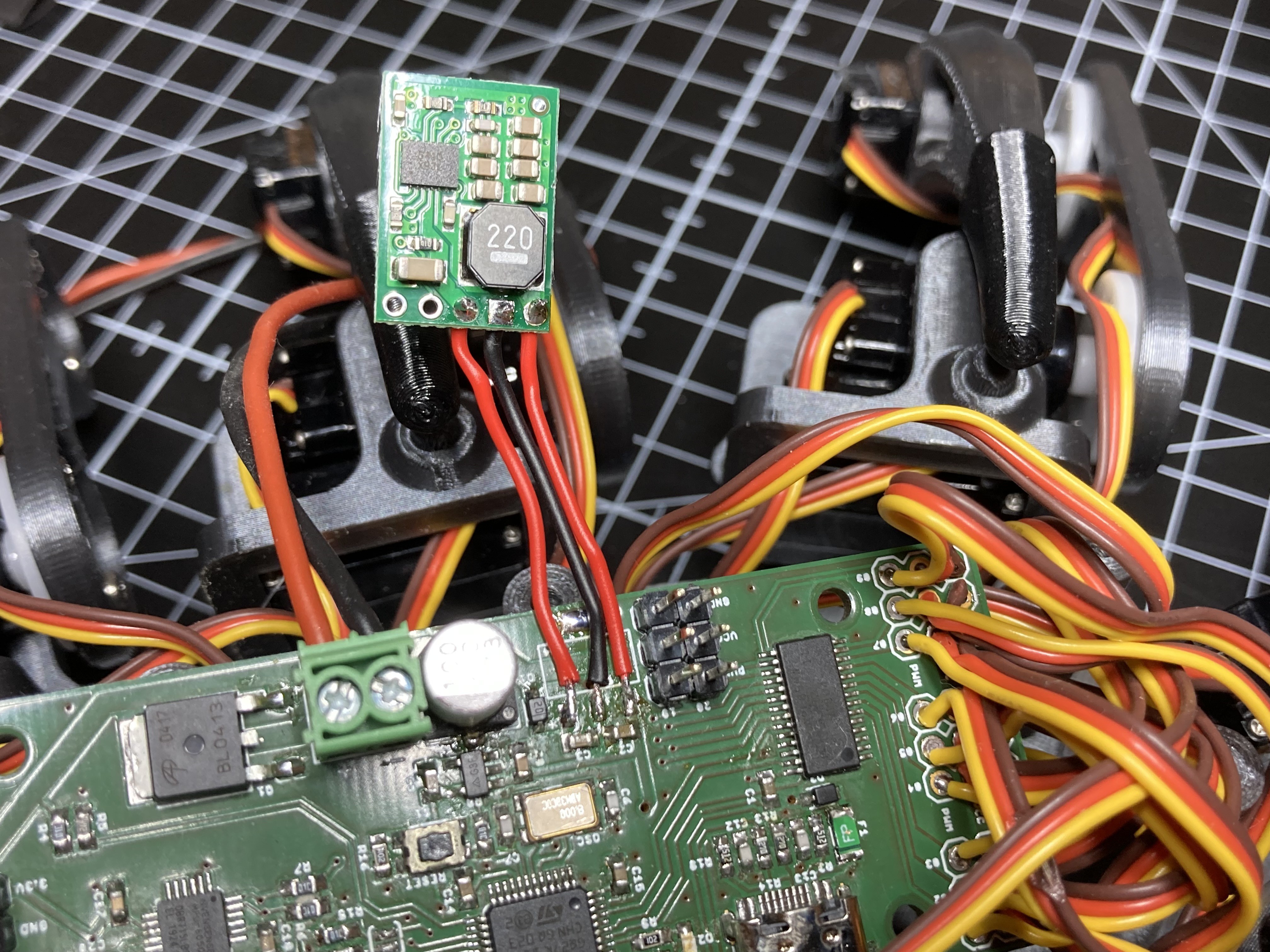
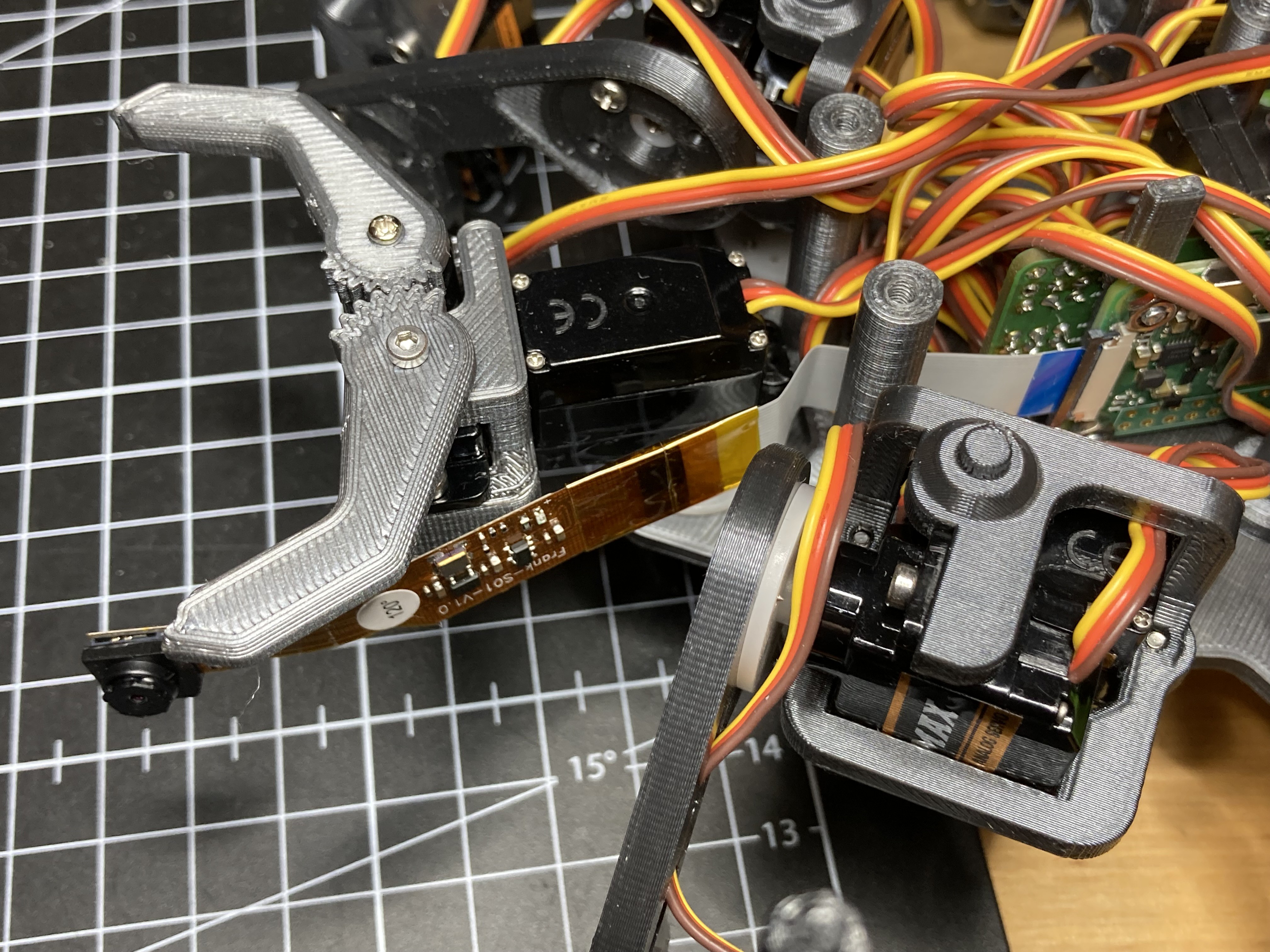
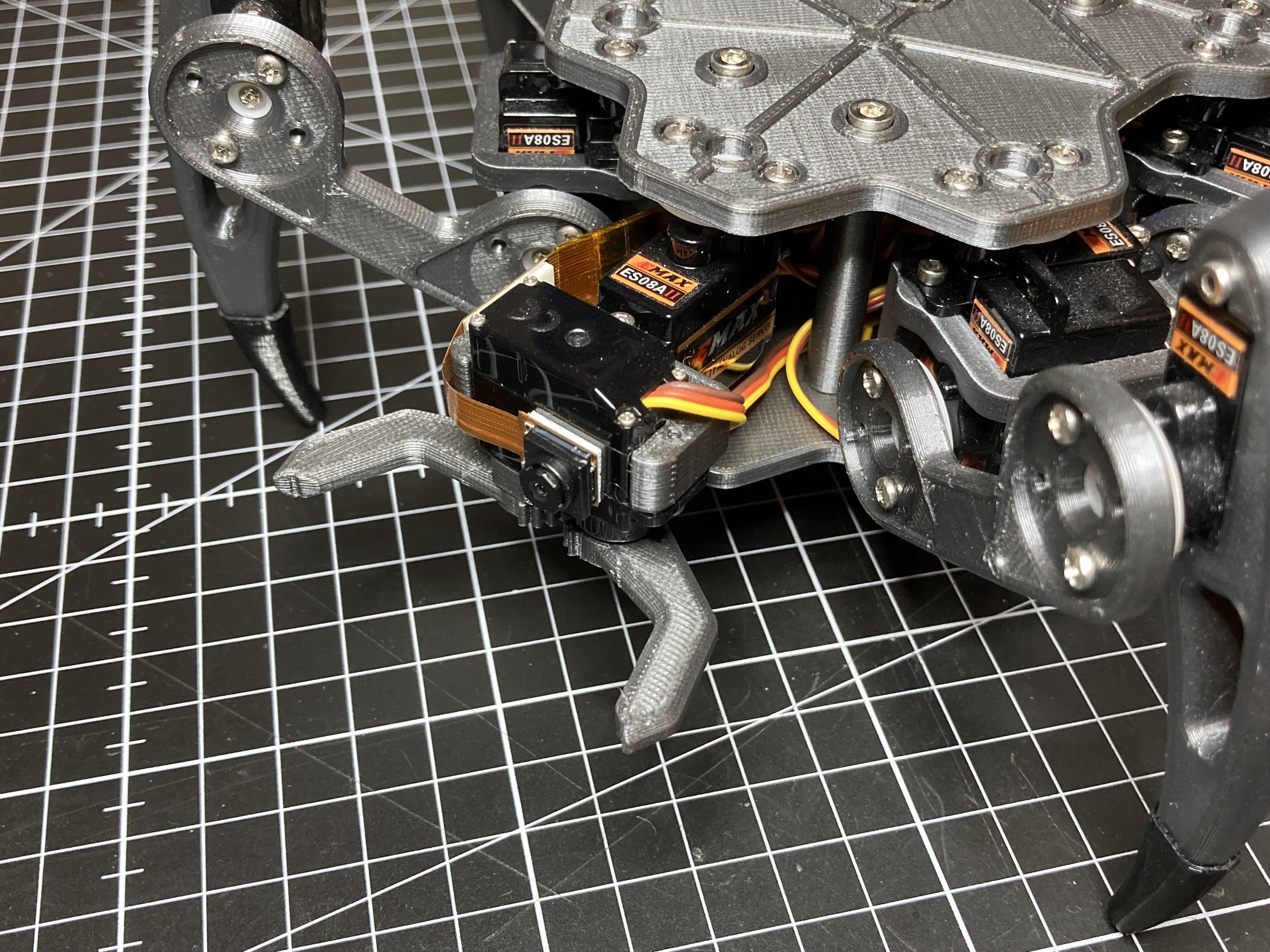
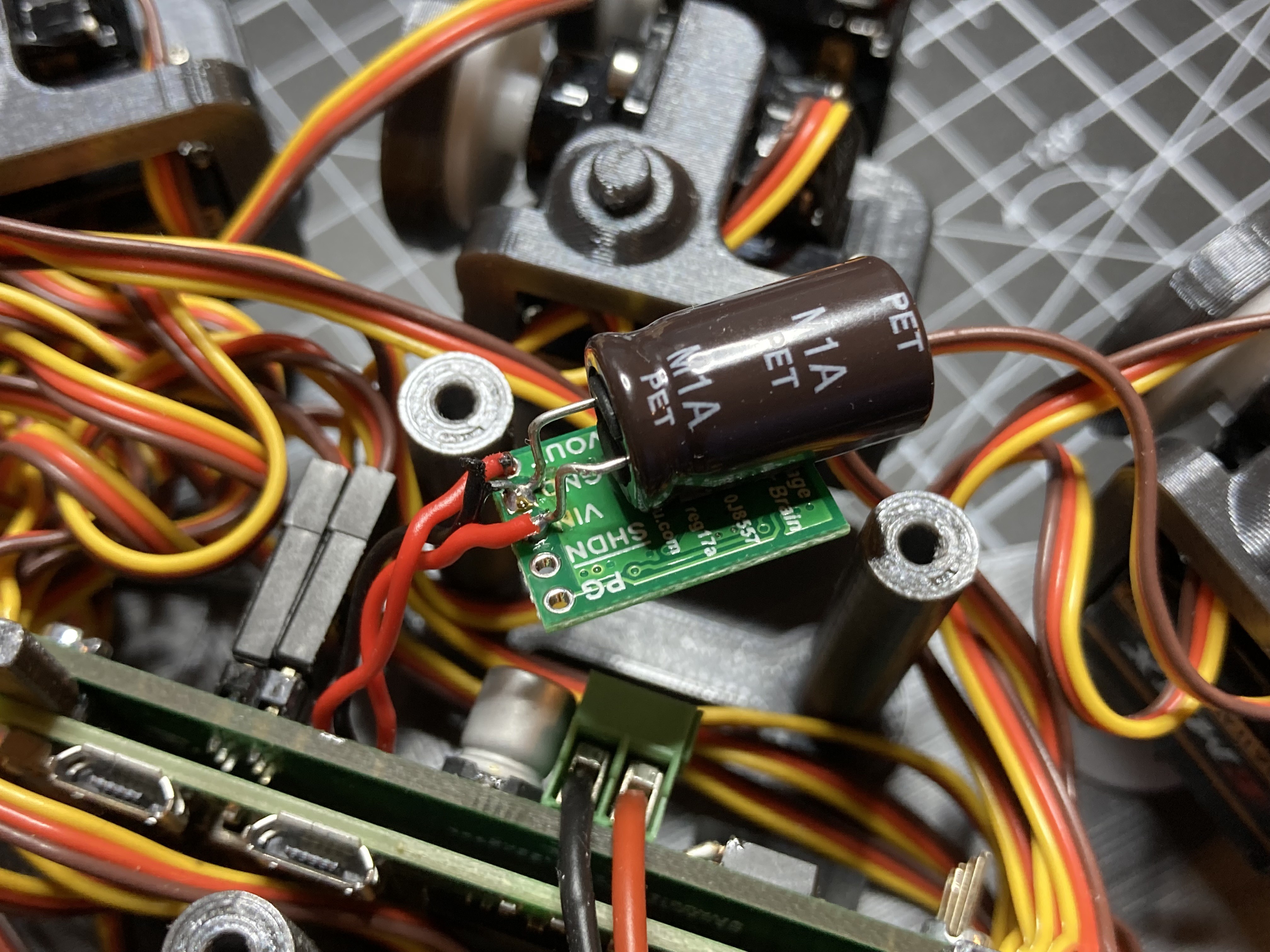
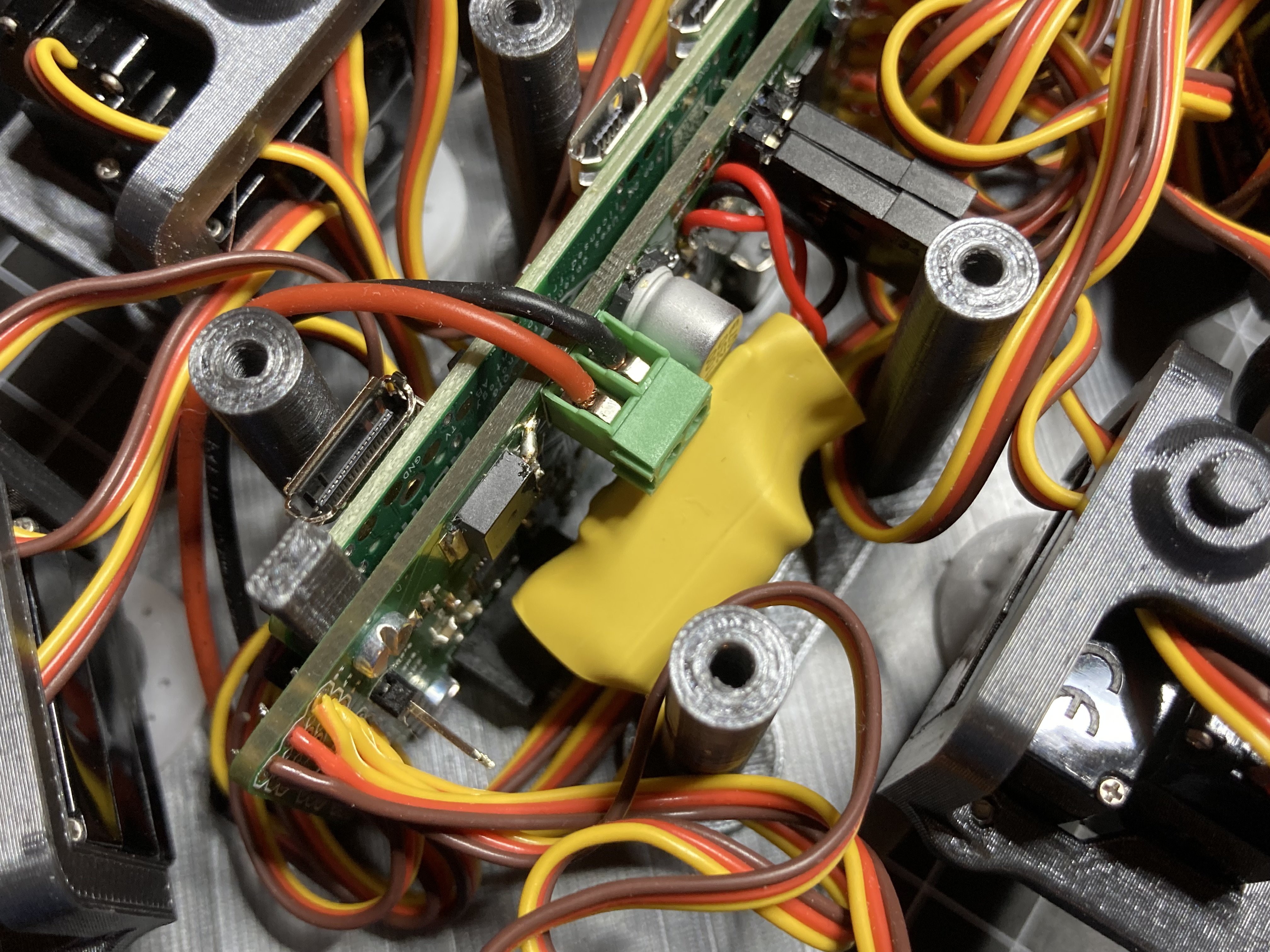
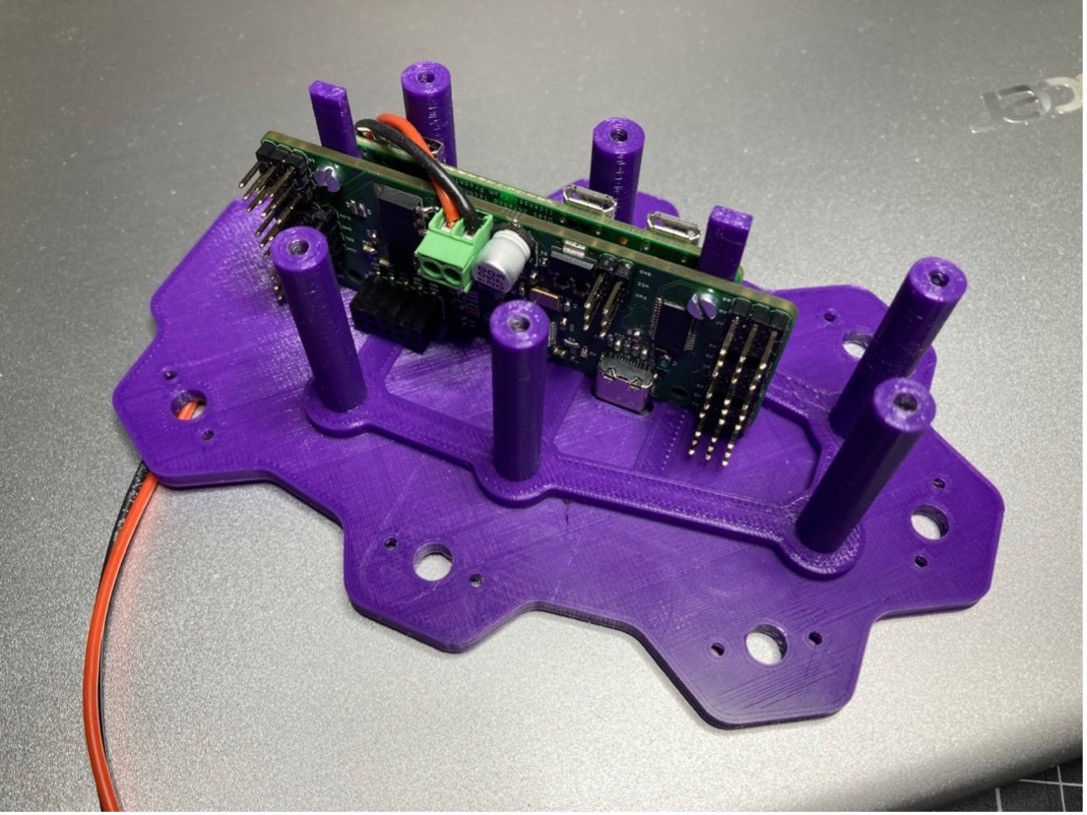
- Hardware-wise a custom circuit board holds the STM32, the PWM controller and a few other components while the Raspberry Pi Zero is plugged into the back of the PCB. The servos used are inexpensive EMAX ES08A II. Anything apart from the electronics and servos is 3D printed.
The whole project is heavily inspired by Matt Dentons incredible µBug, adopting its dimensions and proportions.













 Mike Redrobe
Mike Redrobe

 ACROBOTIC Industries
ACROBOTIC Industries
hello,I use the relaese version of software.but i don't know the vnc ursename and password,can you tell me.thank you.