 Petar Crnjak
Petar Crnjak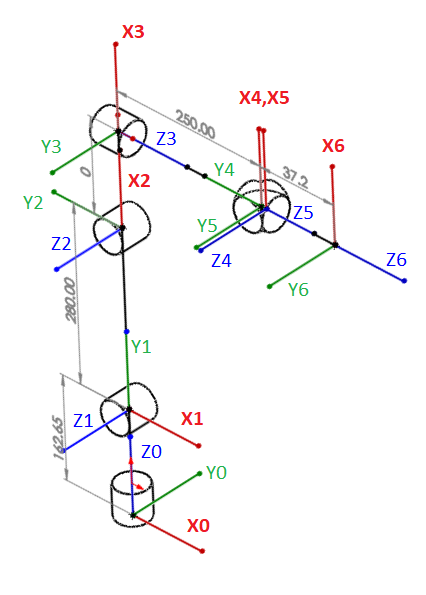
So this is a kinematic diagram of the CM6 robotic arm. you can see that robot has a spherical wrist since axes Z5, Z4, and Z3 always intersect.
And here is DH table!
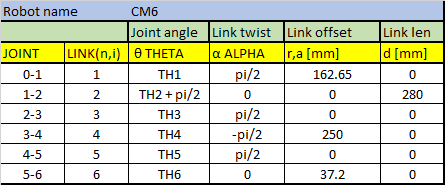
I also always like to have written what does every parameter mean since I forget every time so here they are! :D
Link offset = distance Zi-1 from Oi-1 to the intersection with Xi.
Link Length = Distance from Oi-1 and Oi measured along Xi
θ THETA = Rotation around Zi-1 to get Xi-1 to match Xi
α ALPHA = Rotation around Xi to get Zi-1 to match Zi (We are rotating frame Oi-1 around Xi)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.