 josh collins
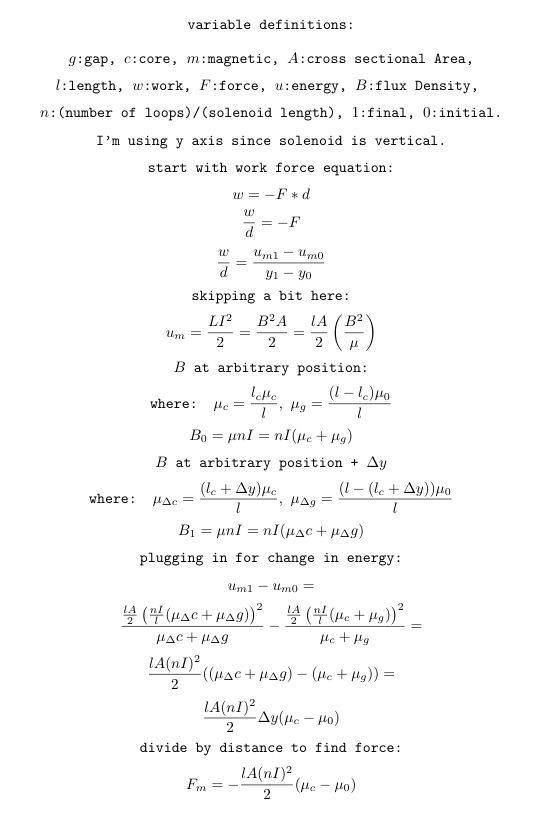
josh collinsIn the post before the last, I realized I had miscalculated, so this is my fix. It's almost the same Idea, except I find the change in energy over distance, instead of using energy explicitly at an arbitrary point. I have also done a comparison to another interesting coil geometry that seems promising. I will show my calculation for that, and possibly other geometries in my next update though. I this version decided to add some variable definitions to help understand. I also skipped through simplifying a little bit.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.