 Kal
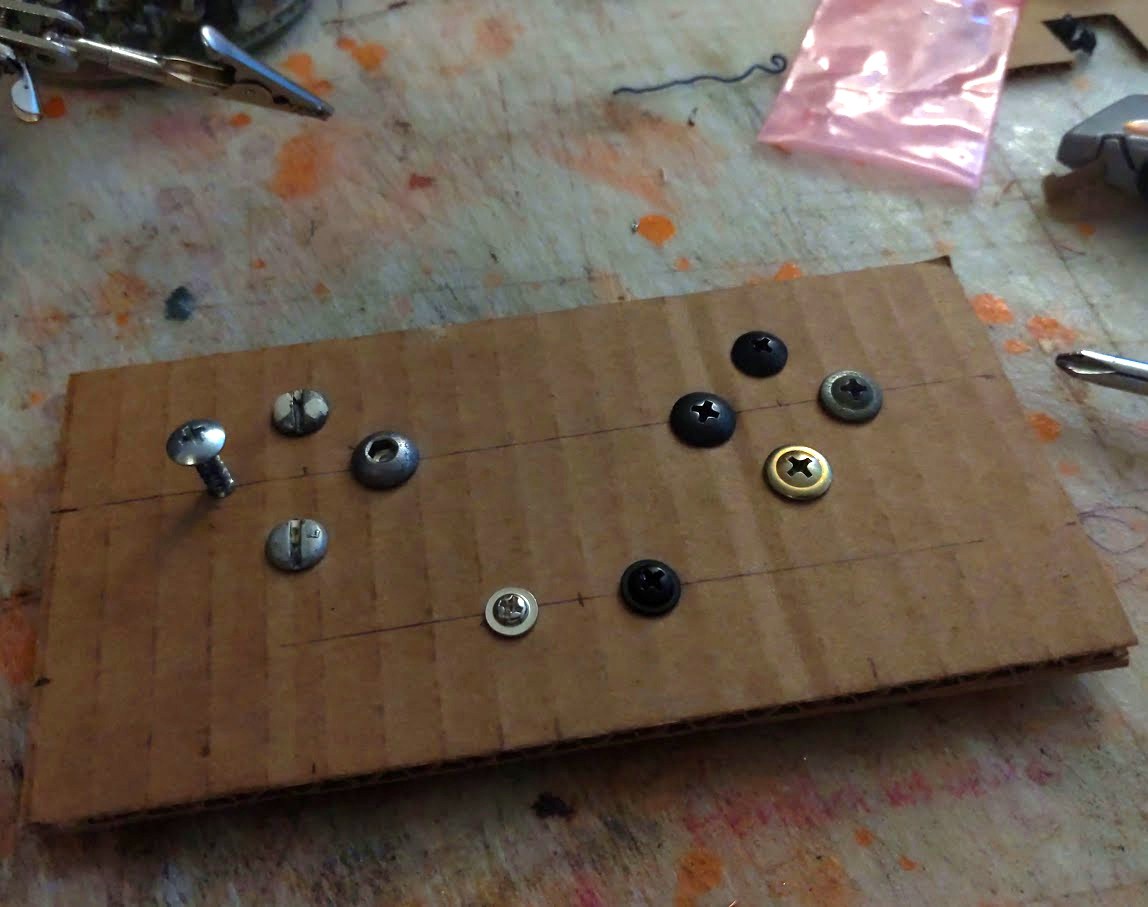
KalDimensions are based roughly on the SNES controller, that was the design guideline. I kept it modifiable for some reason, there's a part of the back cover board that can be cut out and the 2ndary components are connected to the arduino by bits of female header. Usability was a secondary concern to beauty, this is not the right way to make a gamepad, but it turns out very usable. I'm really happy with the functionality. It feels good in the hand, too, i love the texture this kind of papier mache creates.
0%
0%
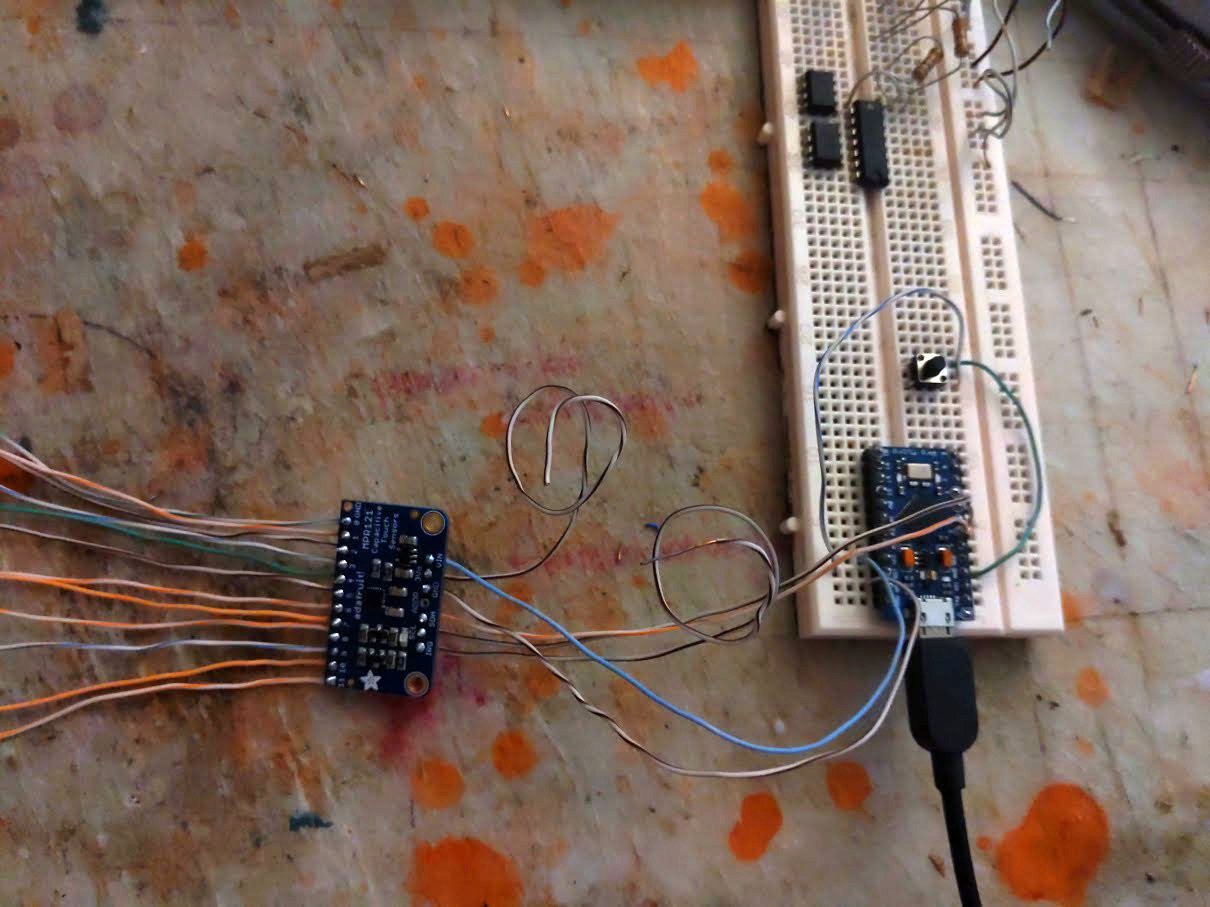
Capacitive Gamepad
A sculptural USB gamepad with capacitive touchpoints as inputs
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 land-boards.com
land-boards.com
 arief ibrahim adha
arief ibrahim adha
 Chromico
Chromico
Very cool!