 shane.snipe
shane.snipeOn my last punch list, I had a debug of my old build, and soldering a new build, to confirm the main double demux structure, which reads the sensors and runs the motors.
So I took apart hop along and found some of the solder joints from the flex to the header were broken, which probably resulted in intermittent connections.
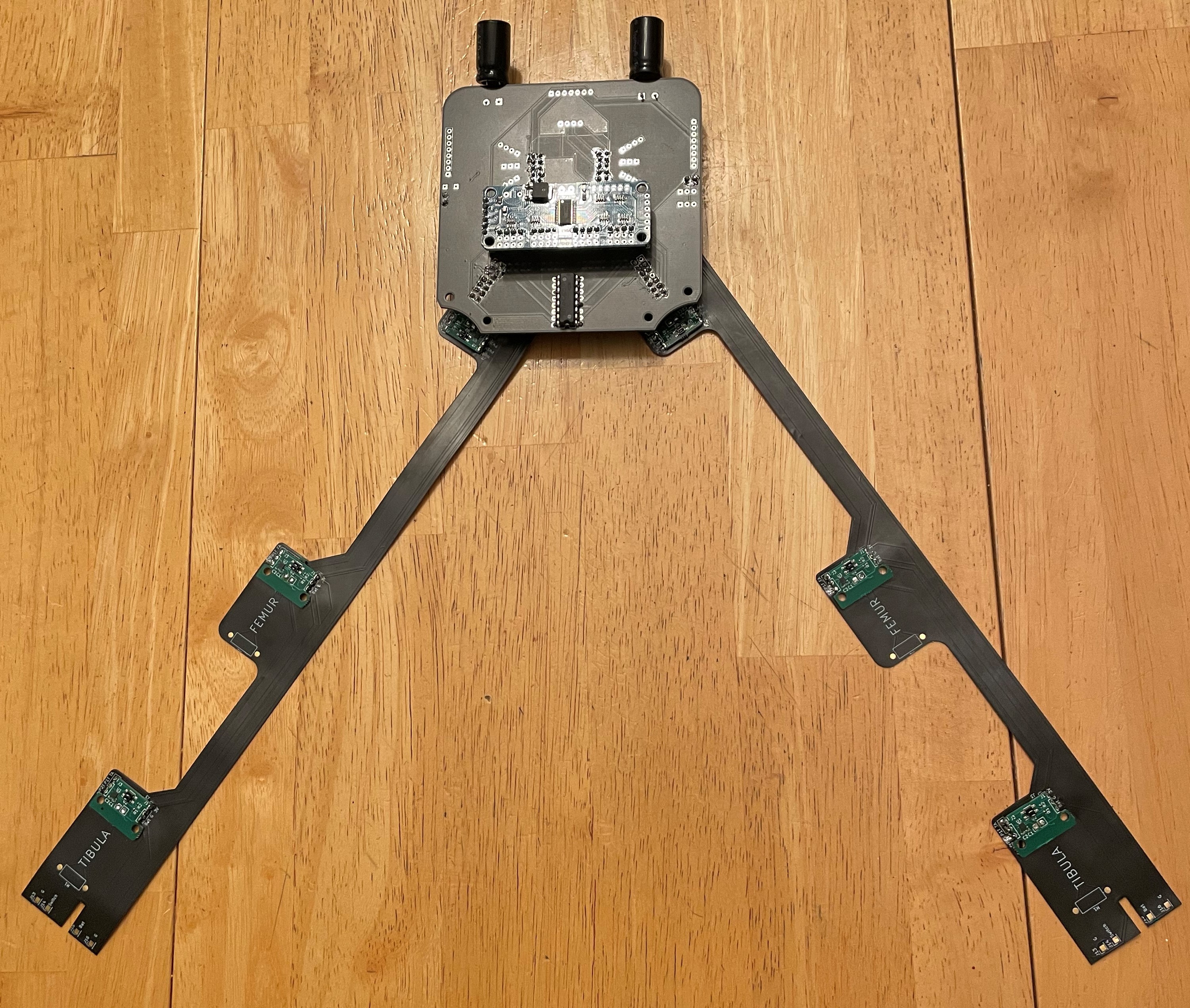
The board is being replaced, so I put headers on it so I could remove the parts, and I soldered everything up. The boards and SMD headers are going on the flex like butter now, but it still takes a half hour a flex. I put the ESP on the back and the PCA9685 board on the front so they do not overlap with the flex headers. This is fixed on the new boards but it makes me want to think more about what is hard soldered and what is socketed. I blew my PCA9685 board last time and bricked the whole device. I think the motor terminals touched the PWM pins because suddenly there were no longer any I2C devices connected to the ESP32 when I did a sweep.
Tomorrow I should connect the motors to make sure I can make them all run as I expect. I also want to check each sensor in turn through the double demux.
Here is what it looks like front and back before I put on the the motors and 3D printed parts.

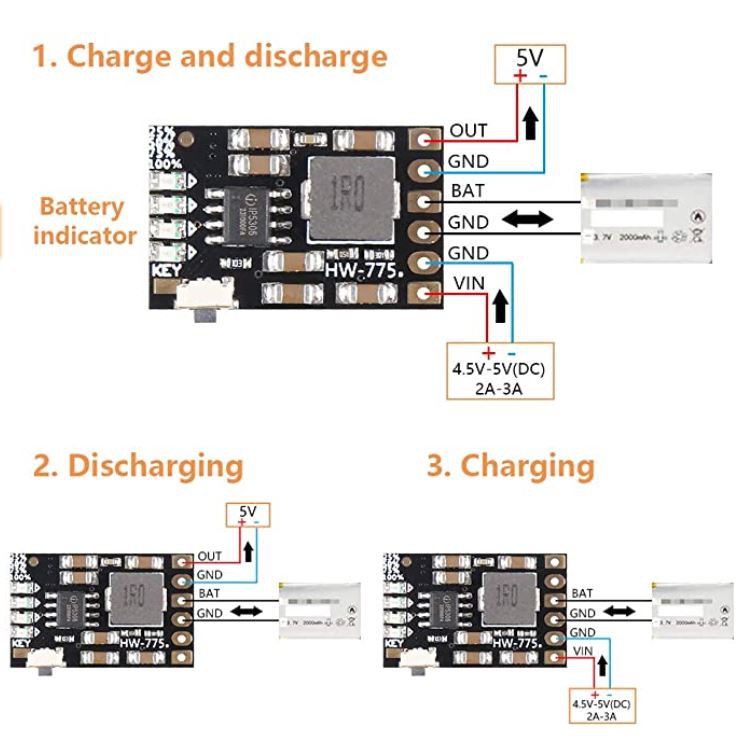
I also ordered some new battery charging and 5V boost circuits yesterday morning. They arrived today and I think I might keep the Micro USB portion outside the robot, and just connect it with some dupont connectors onto header pins coming off the battery board. The board is small enough I can put it on the flex alongside the motor and battery in the foot.
I am a little undecided about whether to put the battery in the feet or on the back. On the back I can get away with 1 2000 mAh battery and 1 charging circuit. It reduces the price by $5. The down side is it makes it more top heavy and reduces the chances of it standing up on its own. The circuit is kind of set up so that I can go either way. I will do some experiments to make sure the motors were not moving because of a lack of juice. This would push me in the direction of the 1 2000 mAH. battery. Since it s a 3C battery, that would give me 6 amps which is more than the motors use. Here is the circuit shown on Amazon.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.