 shane.snipe
shane.snipeWhen its 4 AM on Saturday and your dreams are you punch list, there nothing to do but get up and live your dreams! I have some interesting challenges to work through this weekend.
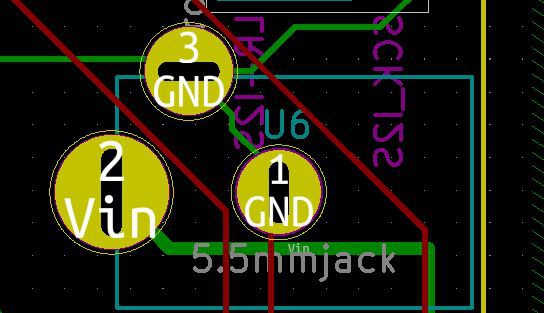
1) Remake the hip boards with the correct pinout on the header. Add better silk screen. Check for the stock of the less expensive motor driver. Order the assembled hip boards. Order the longer FFCs from Aliexpress. Fix the connection on the brain board to the 2.1mm plug. The ground and Vin are reverse which would not make for a good day. I should make the files available for the boards incase anyone feels ambitious.
Well I used the auto router for the first time in Easy EDA. The last auto router I used was on Eagle and it was not great. I then changed to Kicad and it does not have one native to it. So I was shocked to see the following really nice layout.
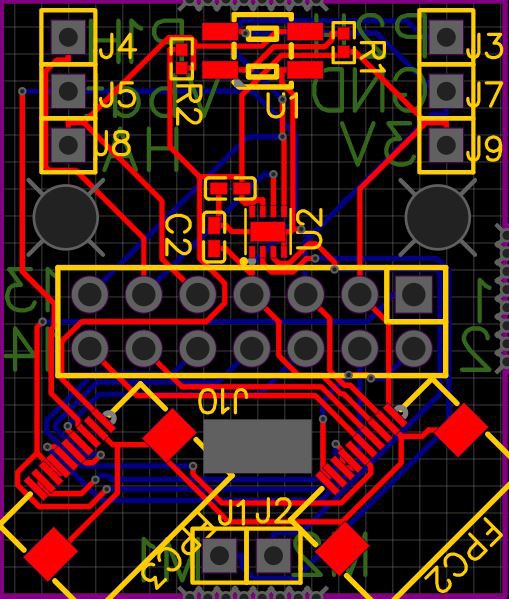
The only thing I will change is the bottom trace that goes close to the mouse bites.
I confirmed I need a B type FFC with pins on exposed pins on the opposite sides.
The pin layouts are updated here.
Files I used to order the boards are also in the file list.
I also tried publishing it on the Open Source Hardware Lab.
The integration is super smooth between Easy EDA and JLCPCB. It is not so important for bare boards but for PCBA assembly, I do not think I will go back to Kicad. If you have a self made footprint. I am not sure how you would upload it. They need a footprint defined in the BOM. I am not sponsored by JLCPCB but I will shill for them anyways as it is so cool to see the minute by minute progress updated live. I have ordered populated PCBAs now 4 times and 8 days later I have been getting them. This order is about $3 each on a quantity of 20 and half of that cost is components.
For the Jack output I swapped the power and ground that were mistaken. When I created the symbol I made the pin numbers differently than in the footprint. Power should be at the back of the Jack.
I put the archive file in the files section for the Brain Board. I am still struggling with libraries although I did archive the libraries before I archived the project. I will have someone try to download it and see if they can do it without getting library errors.
2) In depth study on the encoders. Answer the following questions.
a) Graphically compare the output from before and after I moved the ramp out by 2mm.
b) Look into the femur joint which does not have a linear second half.
c) Investigate if tape color will change the output. The tape blocks the outer light to make it more repeatable but may also affect the reflection.
d) For counts over 1000 should I pull the ramp back a bit? Remodel, print and retry.
e) Make sure the Onshape model is updated with the latest parts.
3) Debug the issue with the batteries, BMS and regulators. Presently the regulators drop the voltage to 1-2V when used with batteries in series and the BMS. DC power supply voltage is fine. I expect high frequency effects are tripping the regulators. Maybe when Doug comes back from vacation he can look at it on a scope. For now I will breadboard it and reproduce it to ensure it is not a layout problem. I will then add some capacitors to see if I can filter it out. Last resort is to swap out regulators or the BMS until I find a combination that works.
4) Solder up a new flex to replace the one I put a screw through last time. The goal is to get a robot working with each leg operational in each direction. First thing I want to try is to make it stand up. To make it pop up from full splits, just using the hips. Next would be to get to full splits from lying on its back. I can hand manipulated it to do it but I am not sure if the motors have enough power to do it. Additionally I would like to see if I can use the 1:48 motors to do these things with the new higher voltage. This would so much improve the accessibility.
5) Once I have all the joints working and the encoders debugged, it is back to implementing closed loop proportional control of the joints. Once the basic motion is covered, I want to be able to use the robot itself as a teaching pendant. You could record key points by manipulating the joints to points in a sequence and then the firmware should be able to replay the motion. Bonus points for a com interface where it would output the key point sequence for future programming references. This will unlock the power of this servo motor configuration. Each motor has an absolute encoder and the position can be checked at any time. This is a very high end feature for servos.
6) By now I am well into next week/month but I would like to fine tune each of the joints mechanically. Make sure I have the right range of motion. If I could increase the motion of the femur joint I could sit up which would be nicer. In any case, I should make deliberate decisions on the range of motions and limiting geometry on each joint. I should republish the files in STP and IGS format. I would like to update the Onshape assembly and then bring it into Solidworks. In Solidworks I can make some more fluid animations. I should also work towards tutorials on how to model each part in Onshape, Solidworks and Freecad.
Future work:
Micropython - Doug has worked through the modules. Work through his tutorial and publish.
Native C - Ground up programming.
Accelerometer and balancing - Include the accelerometer in as active control for balancing.
Voice control - Get the microphone working with a wake word.
Voice confirmation - Set up canned responses and get Cya to reply to commands.
Arms - Implement a backpack with the the motor controllers on the back and smaller boards with sensors and FFC connections.
Second set of legs. - Make the seconds set of legs to make this a quadruped. Once the BMS/regulator issues are worked out this should be a subset of the existing brain board. Just the lower half with the top board to board connector.
Now that I have outlined a years work of work, I should quit dreaming and live my dreams!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.