 shane.snipe
shane.snipeIn the last log, I detailed the issues with the Femur joint sensor. The face was not in the linear range and the last half of the travel was not linear. There was a step where the gap is between the parts and the last half was not sensitive at all.
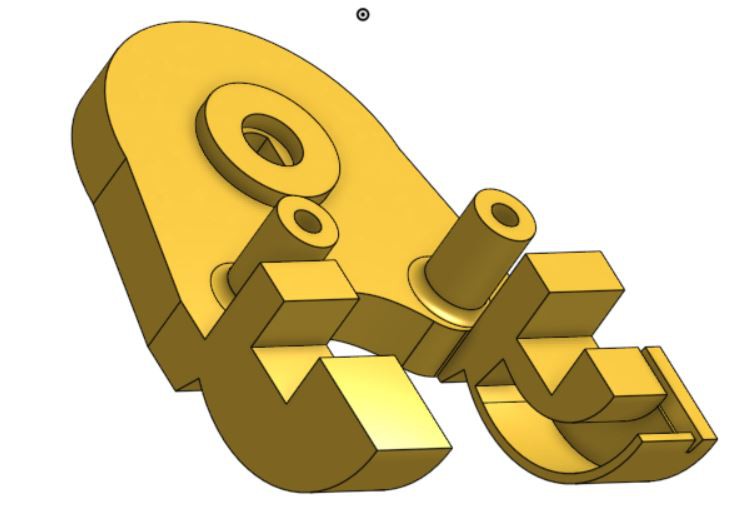
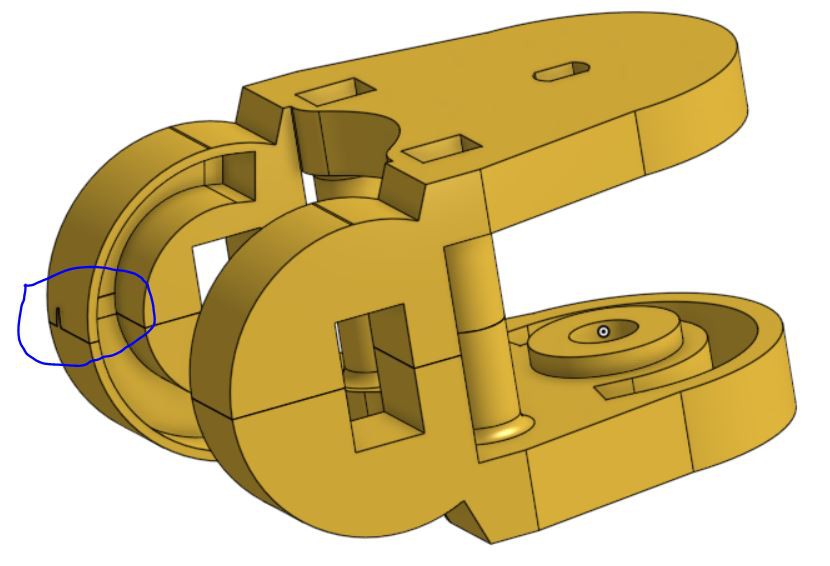
So I fixed three things in the model below.
1) Added 1.5mm to the thickness and pushed the reflected surface out by 0.5mm. This should get it more into the linear range and reduce any weird effects from the outside being too thin causing it to reflect a different color.
2) Added a tongue and groove feature to prevent a big gap from showing and causing a discontinuity in the sensor output.
3) Changed the hard stop location to increase the range of motion. This may allow Cya to be able to sit up. Presently limited to about 120 degrees total travel.
Lastly I made them symmetric because they were starting to look ridiculous.

I will get these printing and see how they work out. I will post some pictures were they are done. I made them pretty much line to line so we will see how it works out.
I also want to make full 1 pcs TPU feet. I am going to try that next.
Lastly, the hip board I made last weekend just shipped. Pretty good for a holiday week. Last week most Chinese companies were 100% shut down for the national holiday.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.