The team has decided to showcase the efforts made in development of the arm power supply. In simple terms, we would like to operate the stepper motors on the arm at 24V to be able to achieve the specific torques at the speeds we desire.
This was the first project of building power supplies on the team based on the tons of wonderful knowledge from TI guides, datasheet recommendations, and more. There was a LOT of simulations beforehand and checking what types of filtering was desired on the output -- we decided to keep it a simple pi filter to reduce the switching noise. The drivers for the steppers are the TB6600s and they appear to be pretty robust and steppers aren't fussy with their power so it was a low risk project.
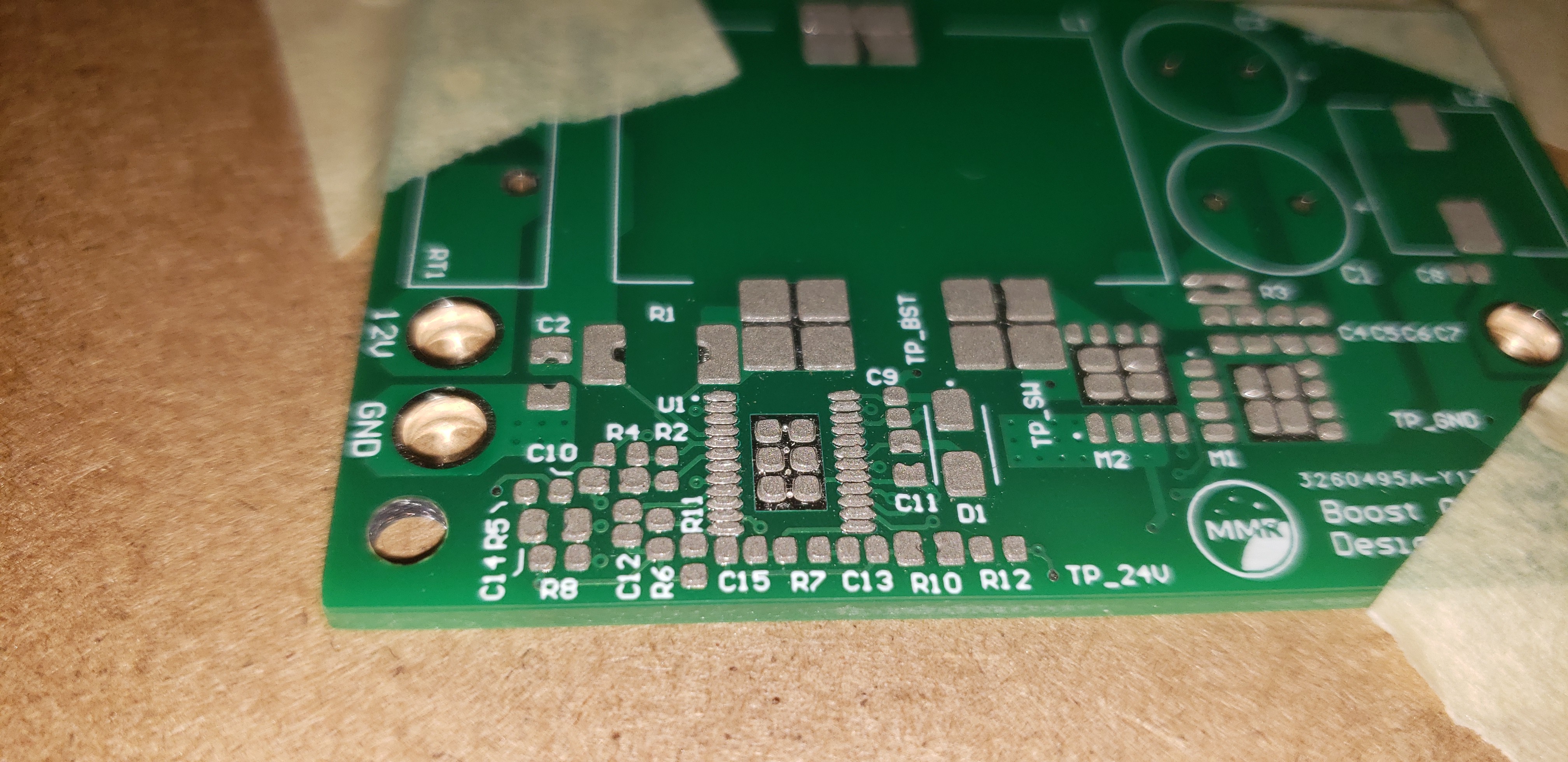
We had decided to make two different versions based on some interesting ideas, the first was a guided ground plane where the bottom was specifically cut to provide the most appropriate return paths and the second was to just a flooded ground plane. You can find out at the end what was the results.
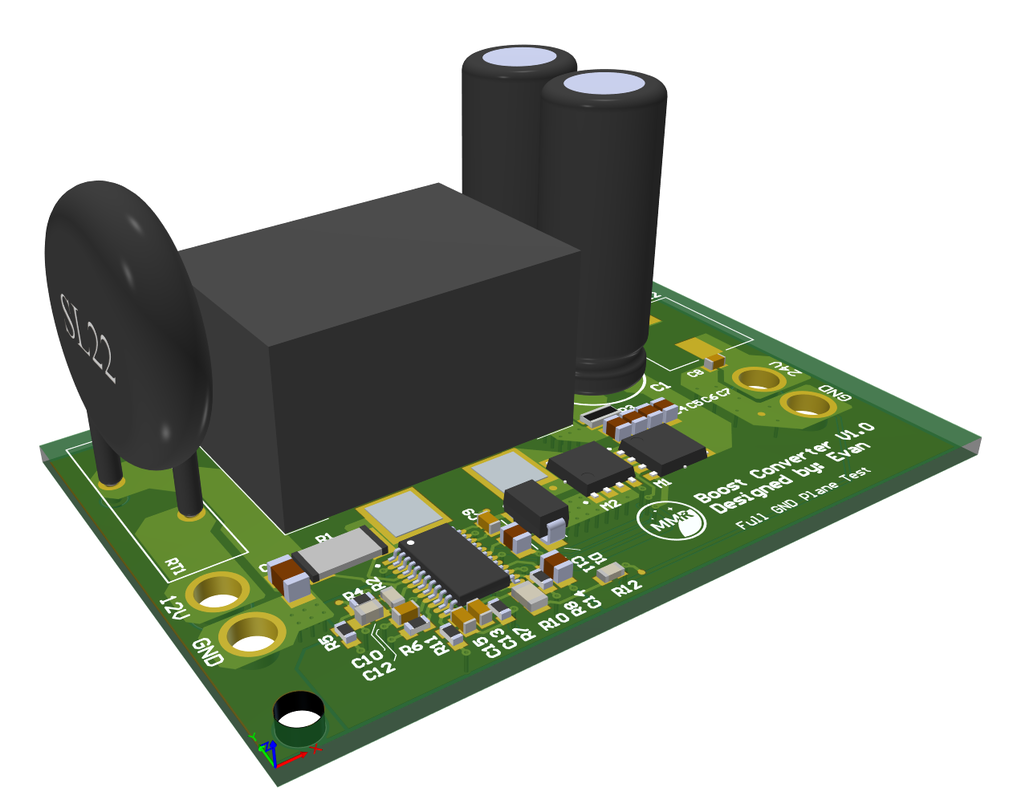
The actual design encompassed the use of the LM5122 by TI and was specified to provide up to 15A due to the multiple stepper motors that would be eventually be connected to the output of each power supply module. This was also the first design where we had learned how to build our own boards with and without using stencils and a toaster oven. As a side note: I hope we get a reflow oven, but one can dream.
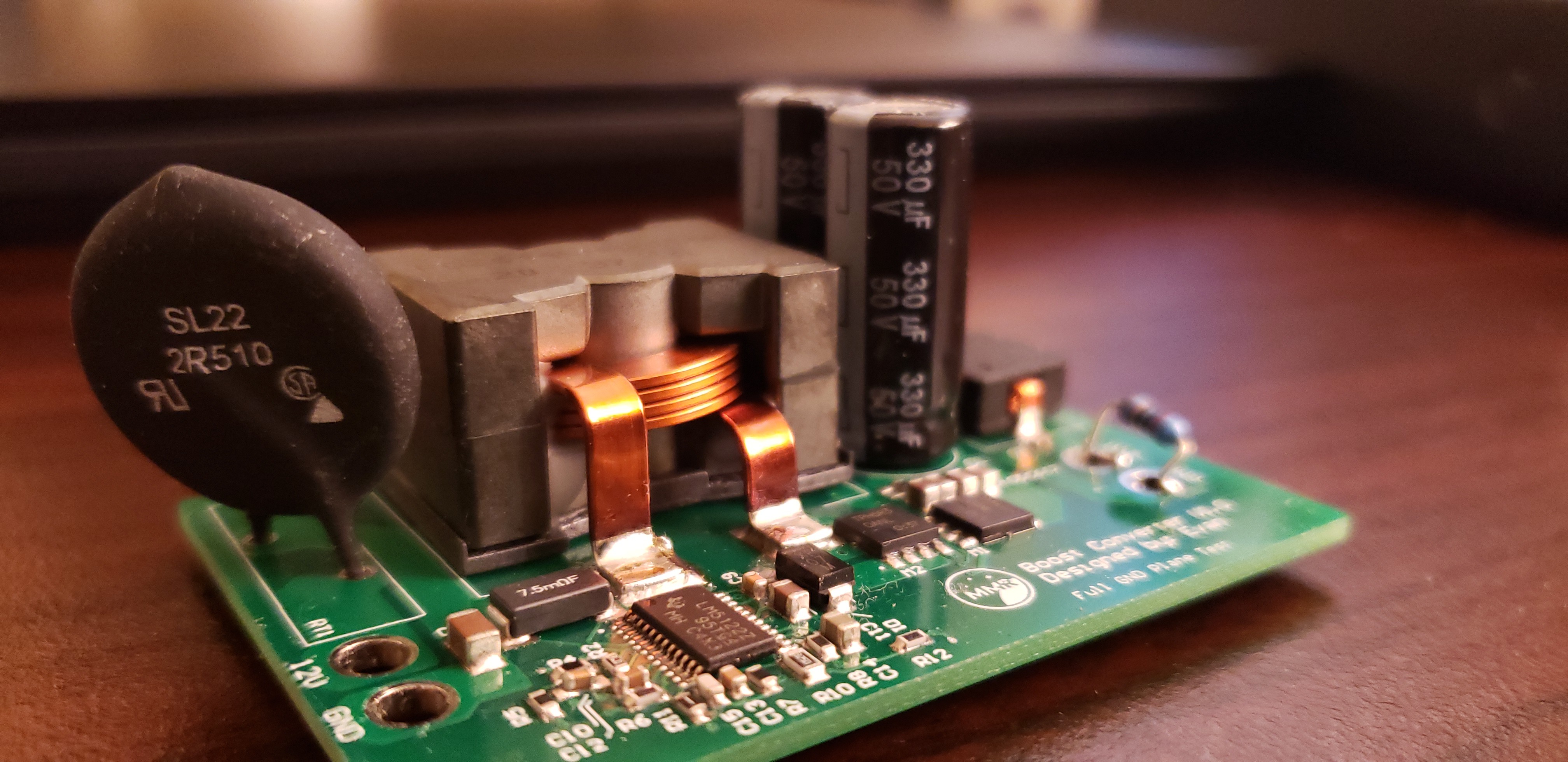
And once we placed the components on the board and eventually threw it in our amazing toaster oven we eventually got this as the end result
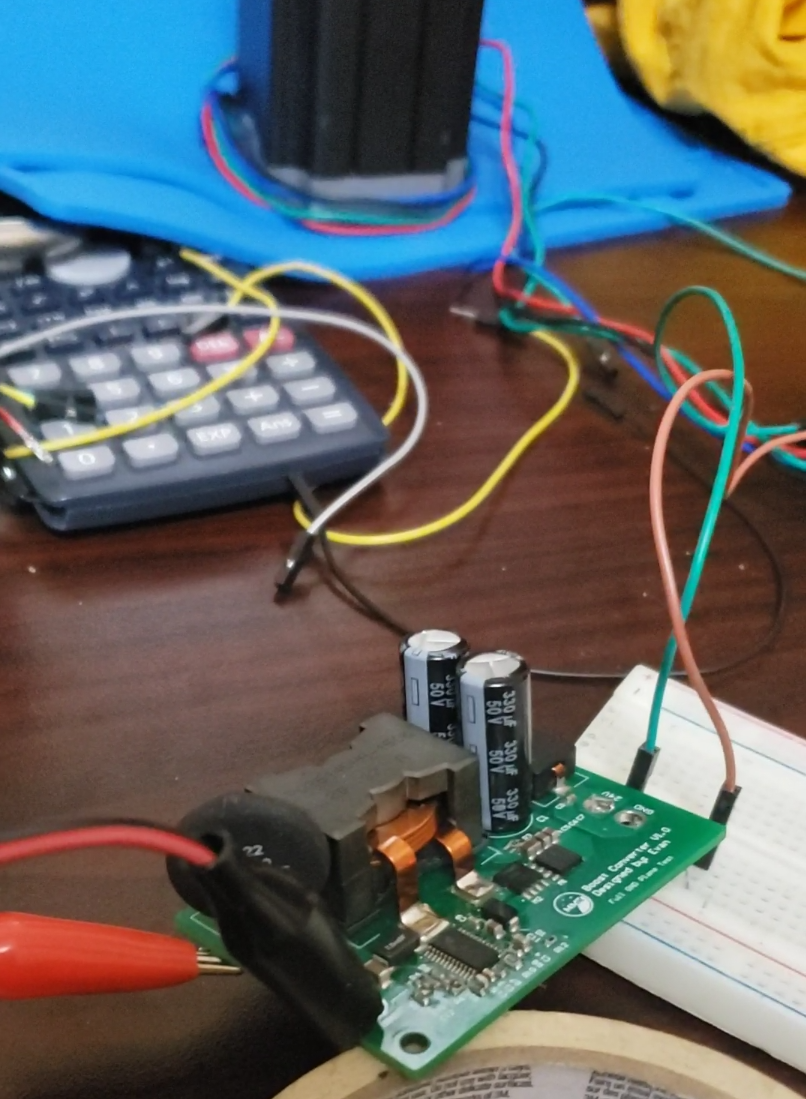
Through testing it was determine that the full ground plane version provided 24.2V on the output which over by 200mV , but the design with the ground plane cut-up resulted in 24.75V which is a 750mV increase which was pretty insane. There was some interesting discussions regarding how we decided to cut-up the ground plane after.
We plan to continue to improve this project to provide additional features such as power monitors, input protection, and more.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.