 NotBlackMagic
NotBlackMagicThe robot drivetrain holds two collision sensor boards where each of them has three IR reflective sensors (TCRT5000). This sensor is composed of a IR LED and a phototransistor to sense the reflected IR light from an obstacle. The IR LED is driven through a 100 Ohm resistor, which gives a drive current of around 20mA, and the phototransistor is connected to a pull-up resistor of 10 kOhm that converts its current output to a voltage that is then converted by the MCUs ADC.
To test the effective range of the IR reflective sensors, the distance that they can sense an obstacle, the setup shown in the figure bellow is used. The robot is set at a known distance from the target and the ADC value of the front facing sensor is registered.
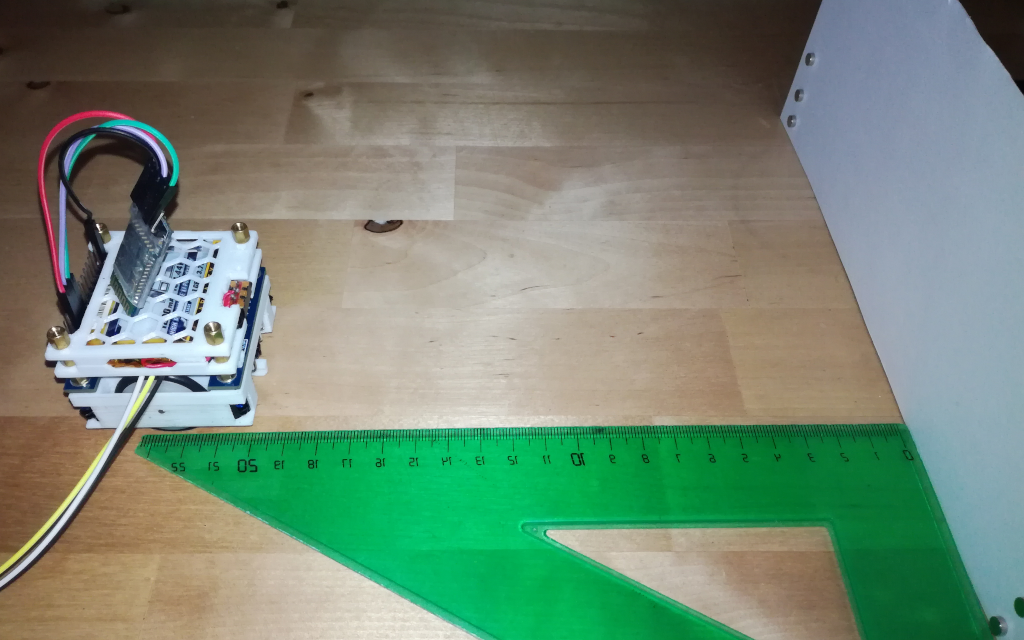
The test was performed with distances from 1 cm to 20 cm and with both a white and black paper target. All the tests were performed without any sunlight (window shades closed) and with very little indirect sunlight (window shades open but north facing window). This because sunlight has a very high IR content and any high indirect sunlight saturates the phototransistor and therefore obstacles can't be detected at any useful distance.
Bellow is a figure showing the results for these tests.
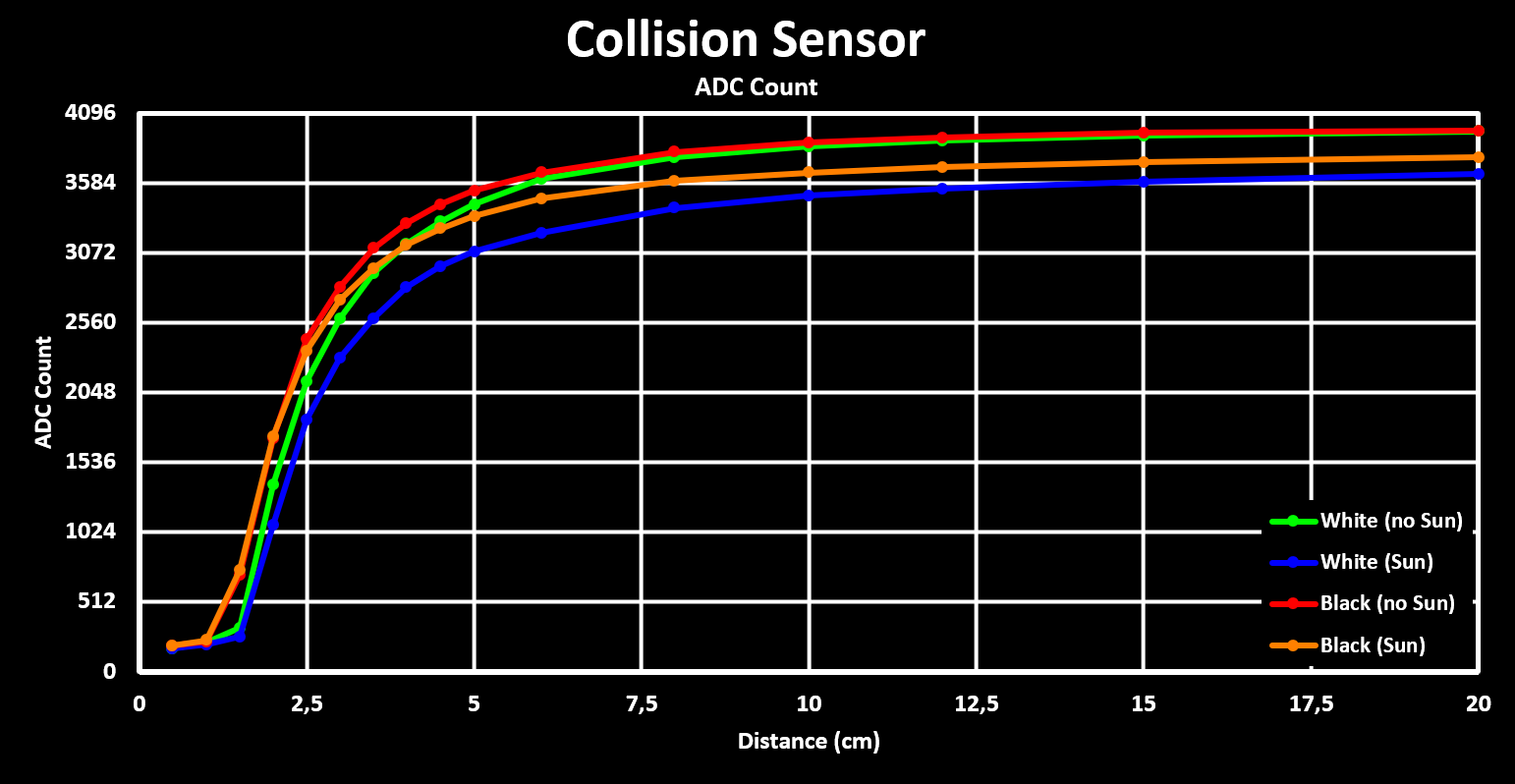
These results show that the IR reflective sensors can be used for distances bellow around 5 cm, in this range the distance can be, more or less, estimated and without having to worry to much about the obstacle color. This is sufficient for the intended use, to detect an obstacle at a distance (> 1.5 cm) that allows the robot to turn around without having to reverse.
As always there is some more information and results available on the Website. Also, more frequent progress updates on projects are published on Twitter.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.