 NotBlackMagic
NotBlackMagicThe first add-on board for the Mini Cube Robot is here! It is a LiDAR board based around the VL53L5CX ToF sensor from STMicroelectronics. This ToF sensor has 8x8 separate ranging zones and a 45° by 45° FoV, giving it a angular resolution of 5.625°, with a maximum range of 400 cm in low light conditions. It also has a fully programmable I2C address, allowing the connection of multiple sensors to a single I2C bus.
A simple breakout board for the VL53L5CX ToF sensors was designed, which holds the necessary decoupling capacitors and pull-up resistors. The module has a 1.25mm pitch header space to which a 7-pin 1.25mm JST connector can be soldered to. Up to six of these modules are hold in place, 45° apart, with a 3D printed holder and connected to the main board.
The main board uses a STM32F103RCT6 at its core, and it powers, controls, acquires and aggregates up to six VL53L5CX ToF sensors. All sensors share a single I2C bus but have separate power down and interrupt GPIO lines, allowing the programming of unique I2C addresses at start-up. Bellow is a picture of the LiDAR add-on board: the main board with the 3D printed holder and two VL53L5CX sensor modules:
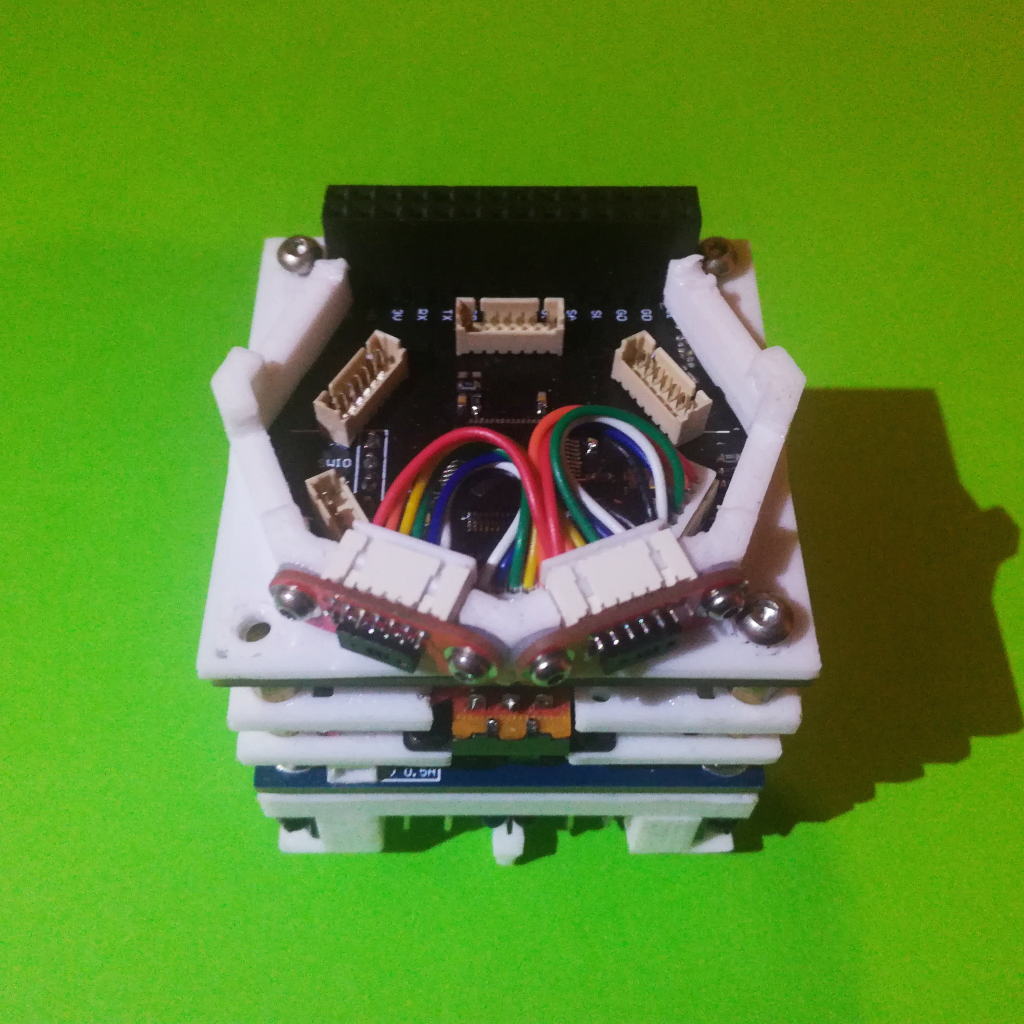
The set-up above gives a aggregated horizontal FoV of 90° with 16x8 ranging zones. This can be expanded to a FoV of 270° horizontally with 48x8 ranging zones, when all six modules are added. With that configuration, the maximum readout rate is around 5 Hz, due to the limited I2C bandwidth of the used MCU (max. 400 kBits) and each acquisition being quite large at around 1.4 kBytes.
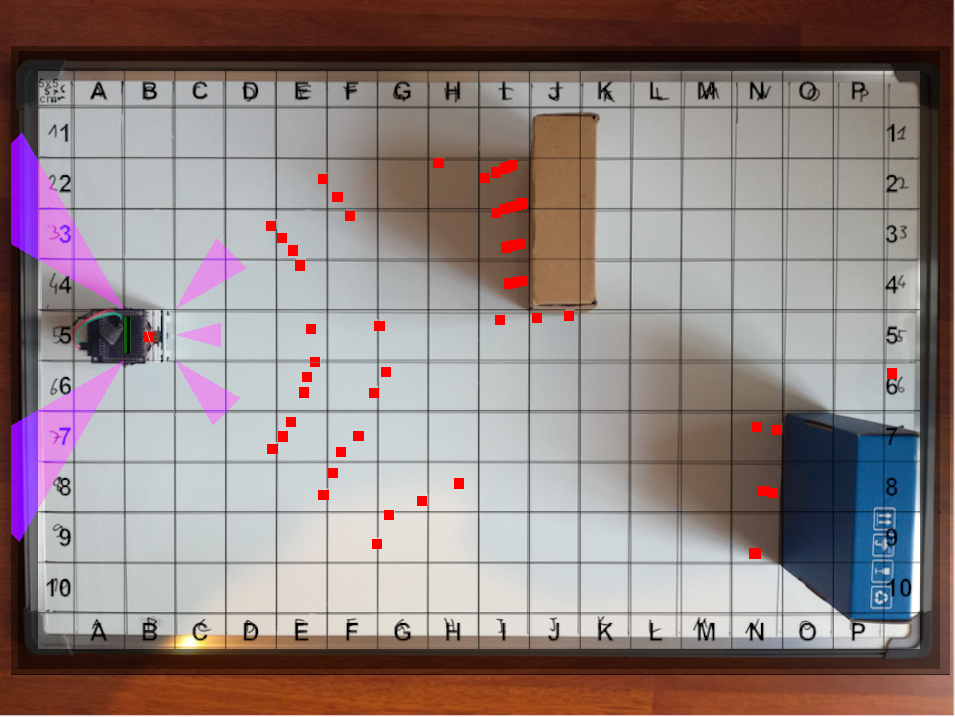
The aggregated ranging information is then sent over Bluetooth to the Robot Hub software, where it is rendered as a point cloud. An example of this can be seen in the picture bellow, where the Robot Hub rendered point cloud is overlayed with a picture of the real scene:
The LiDAR add-on board still requires tuning of the ToF sensor settings and acquisition optimizations. Also, it was not yet tested fully populated. At the same time software for mapping and localization will also be developed, in C# for the Robot Hub, starting with ICP. The basic ICP algorithm is already implemented and updates are posted to Twitter.
The firmware of the LiDAR Main Board is available on GitHub and schematic and gerber files of both the VL53L5CX breakout module and the main board are available on the website, as well as some additional information about it.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.