 Ken Nakagaki
Ken Nakagaki1. Overall Information and Links
- Full Video
- Paper of the Project Published in UIST2020
(for detailed concept and Implementation)
https://trackr-media.tangiblemedia.org/publishedmedia/Papers/701-MTAyM/Published/PDF
- Project Overview Page
https://www.media.mit.edu/projects/hermits/overview/
2. Implementation (Hack) Overview
Our prototype system of HERMITS is based on an off-the-shelf robotic toy, toio, a two-wheeled robotic system. We have built a Raspberry Pi-based hierarchical control architecture. A computer takes central control of the system, while a number of Raspberry Pi micro-controllers were used for connecting and controlling individual toios through Bluetooth (based on Python code).
See our paper for detailed implementation.

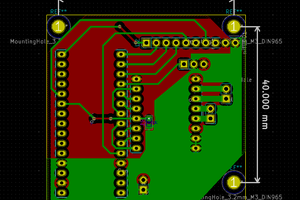
- Active Docking Mechanism
To achieve the active docking, we have modified the toio hardware with an additional vertically moving pin enabled by a micro-linear servo motor. This pin was designed to dock to a slot of mechanical shell for robust connection and motion transmission.
- Github
Robot Control Software and Basic Shell Design CAD (In-Progress)
https://github.com/mitmedialab/HERMITS_UIST20
- toio Hack to enable the Active Docking Mechanism
A blog that describes the robot's hack in Japanese: https://note.com/ken_n/n/nf47466ee9436
video of the hack (controlling servomotor using a piezo speaker control signal embedded in toio)



 Artur Majtczak
Artur Majtczak
 adria.junyent-ferre
adria.junyent-ferre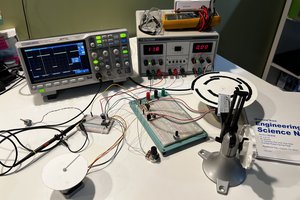
 Apollo Timbers
Apollo Timbers
Congratulations! A really innovative concept!