 Hacker404
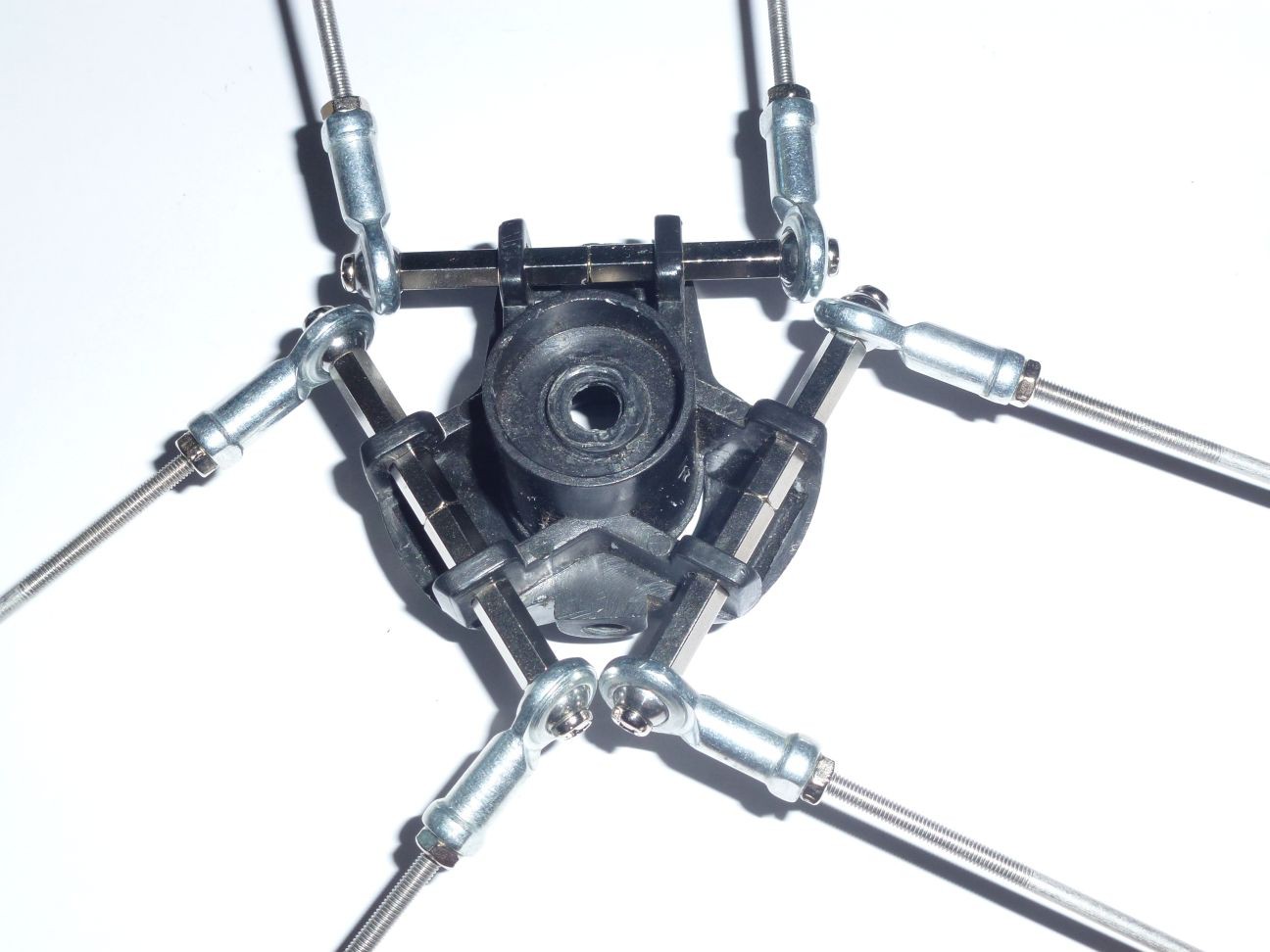
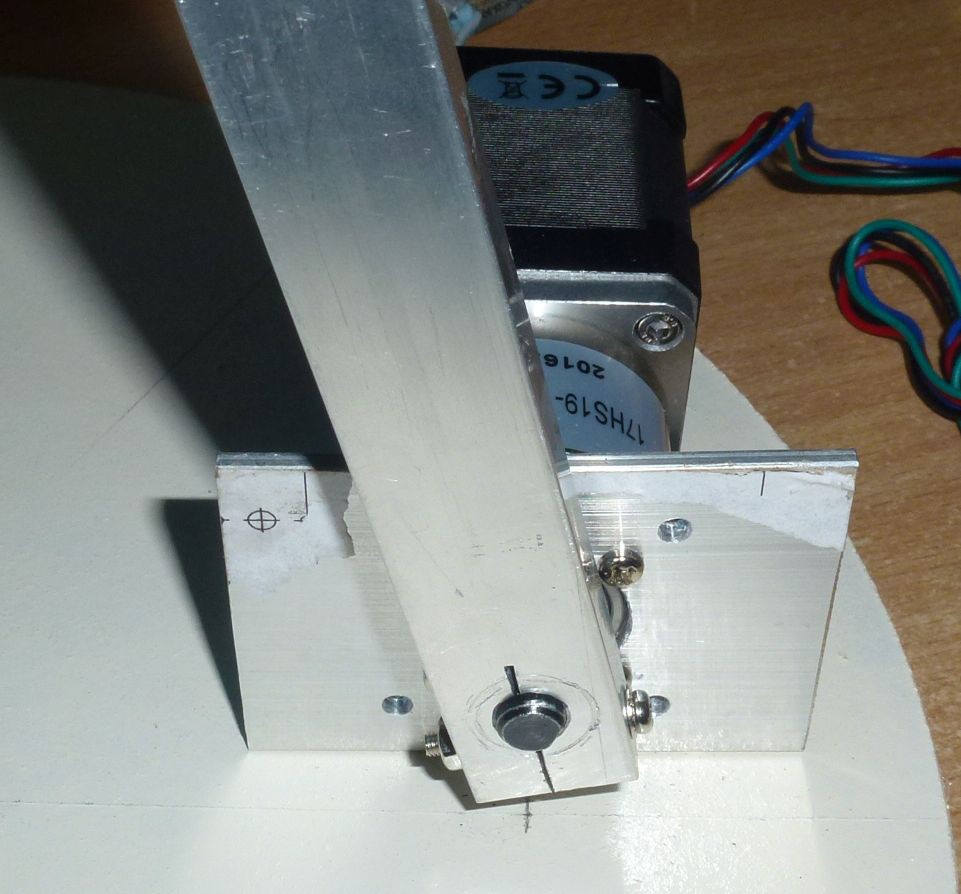
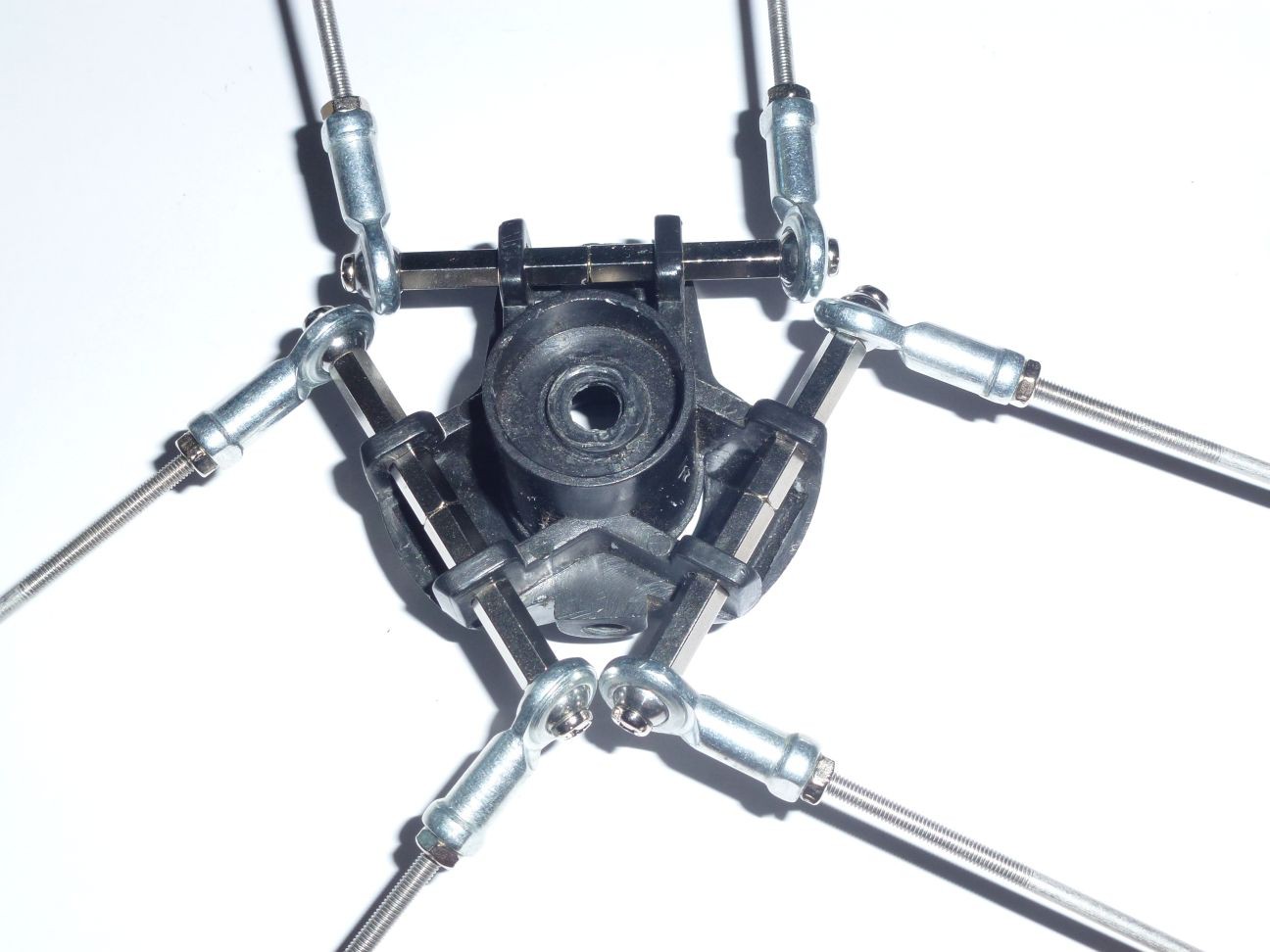
Hacker404This is an 'cost down' version of 3D movement that is intended for drilling PCBs via CNC but it could as easily be used as a 3D printer by adding a hot end and extruder.
First up, I will pay some homage to the project linked below as it really was the inspiration -
https://hackaday.io/project/11346-coffee-maker-delta-3d-printer
Most of the math is here -
http://www.marginallyclever.com/other/samples/fk-ik-test.html
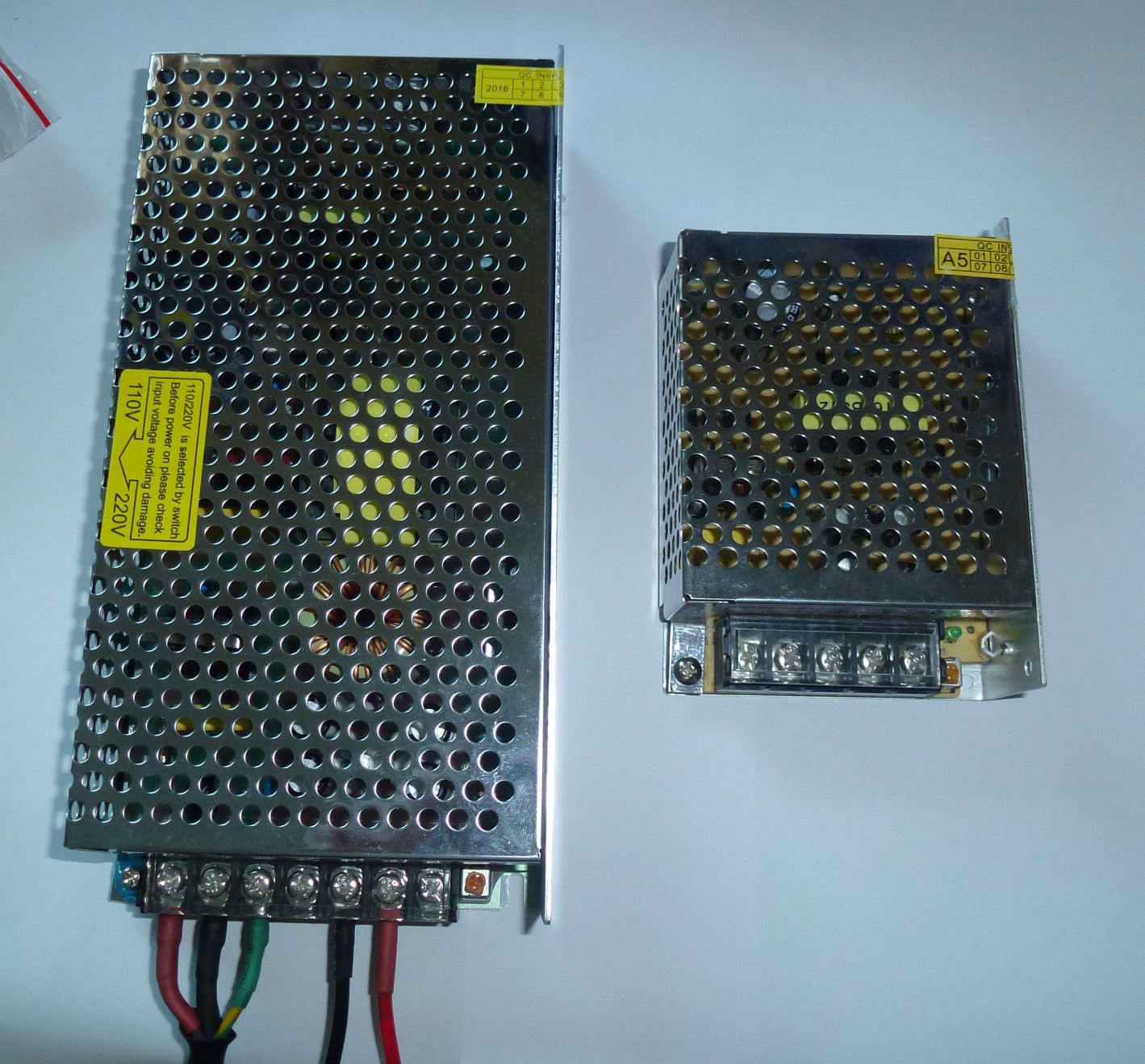
But I will have to redo most of the math so that it can work with integers on an 8-bit micro. I am currenly using a RAMPS 1.4 shield ontop of an Arduino Mega (ATmega2560) 8-bitter.
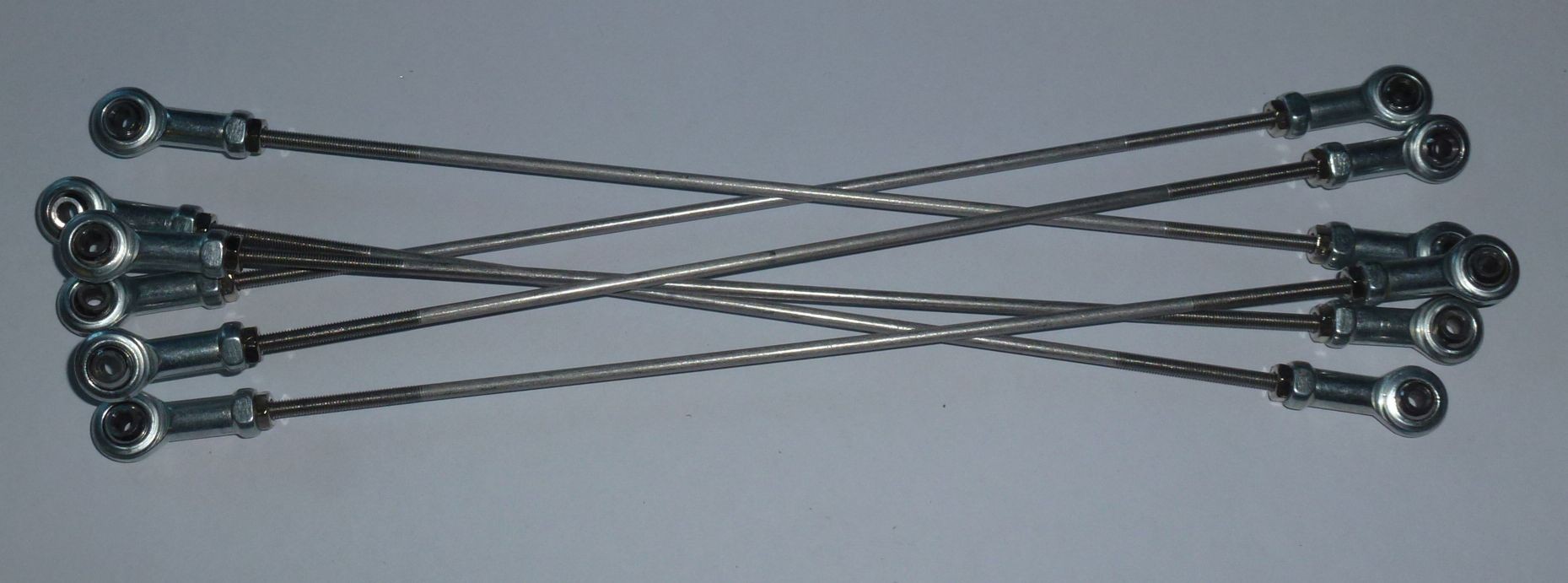
Linear rails / bearings and ball screws / threaded rod are very expensive.
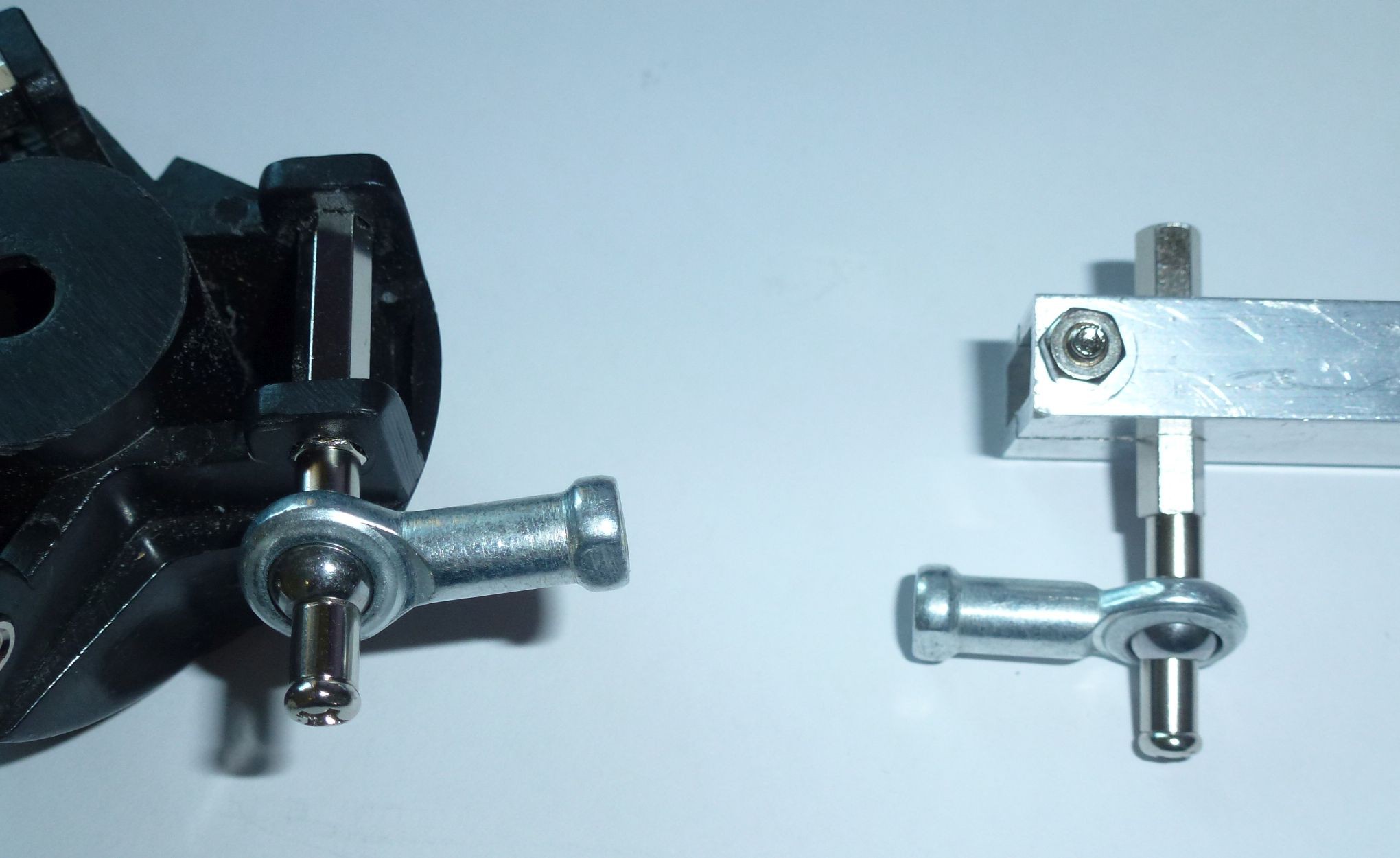
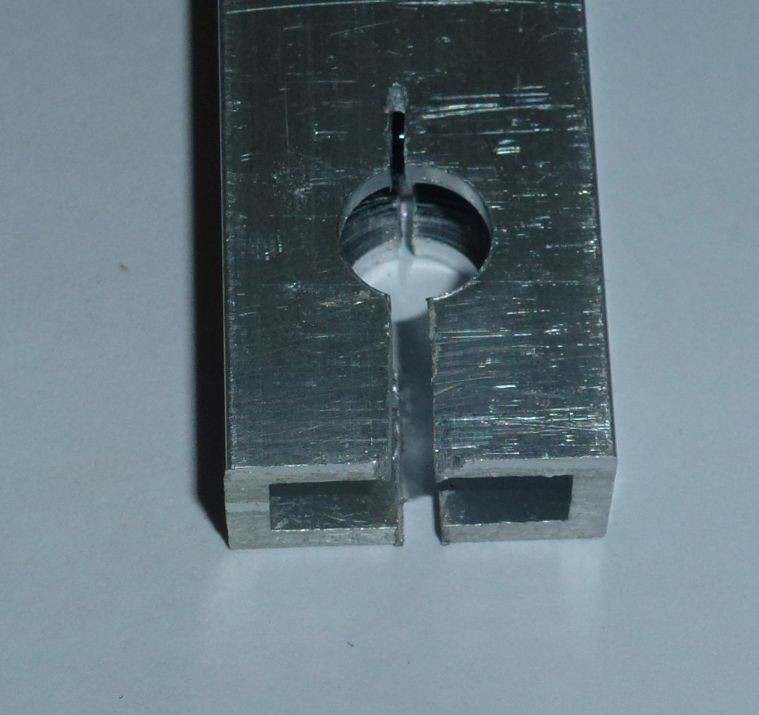
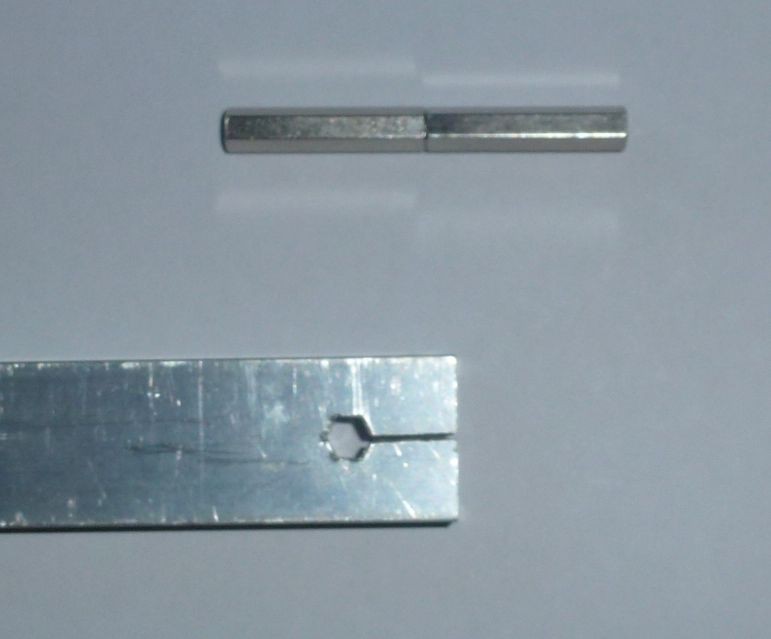
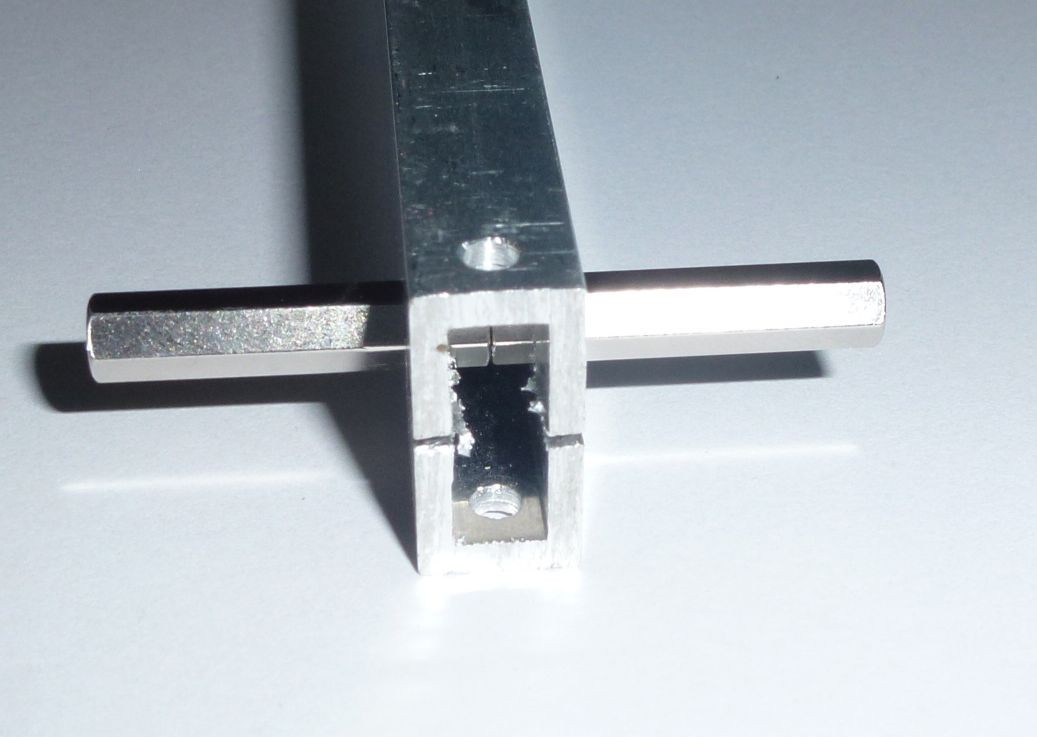
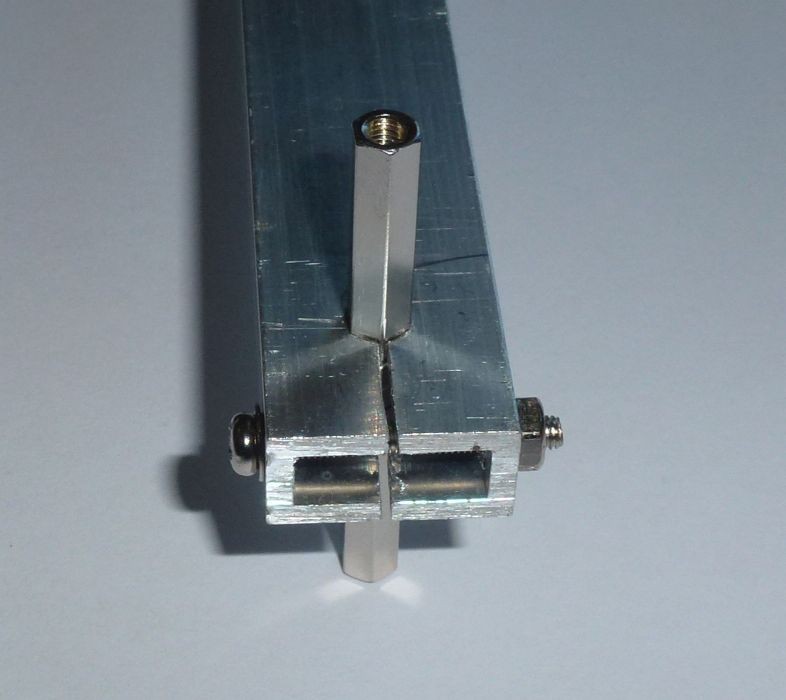
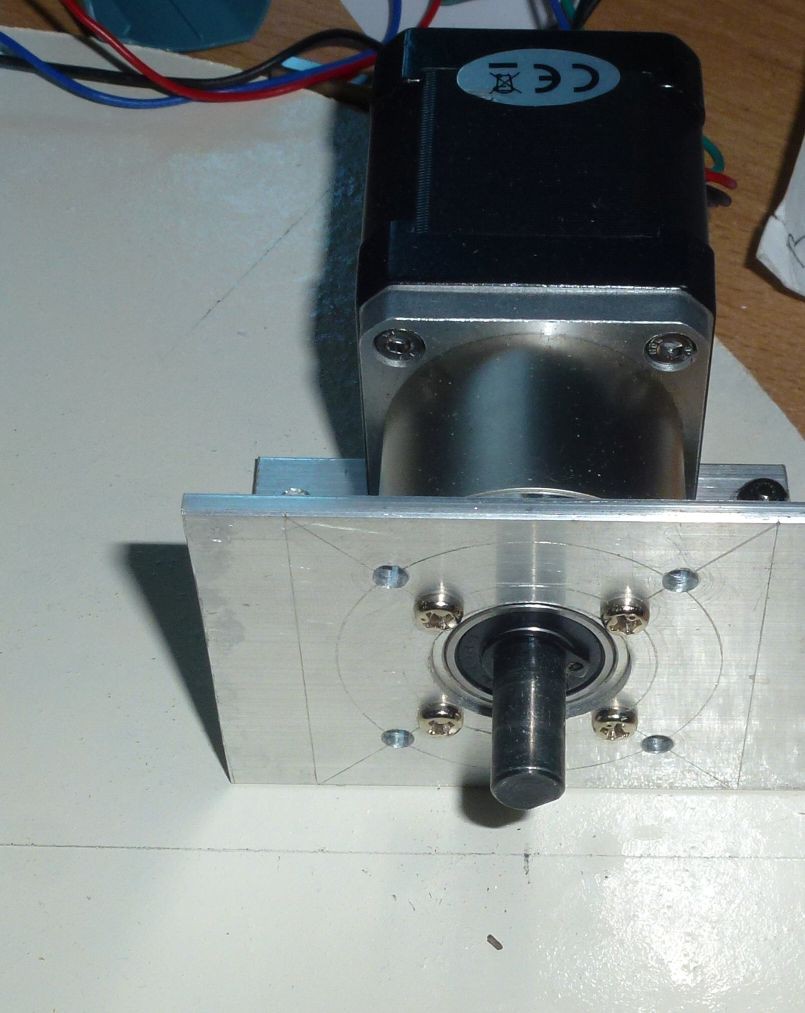
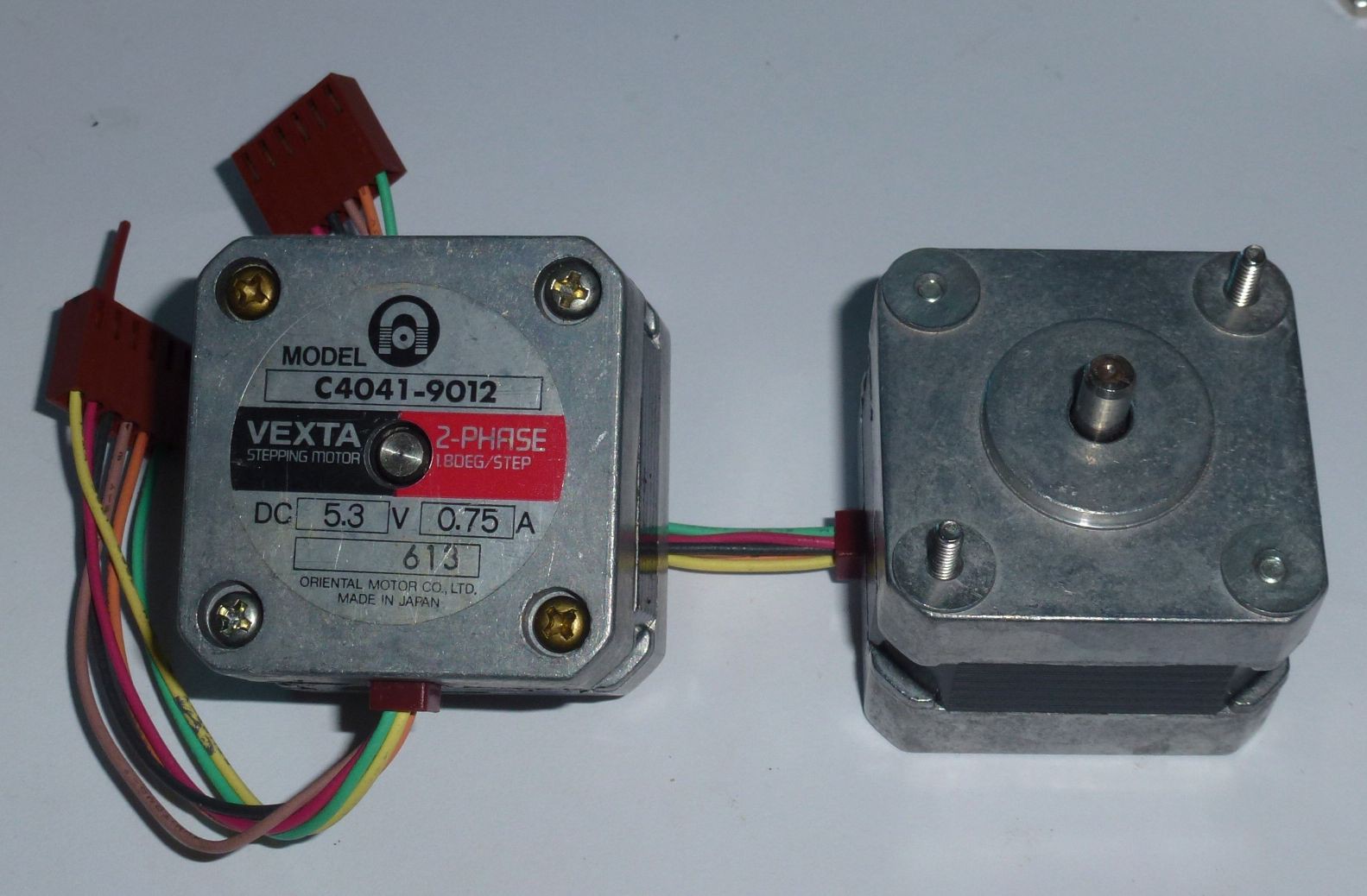
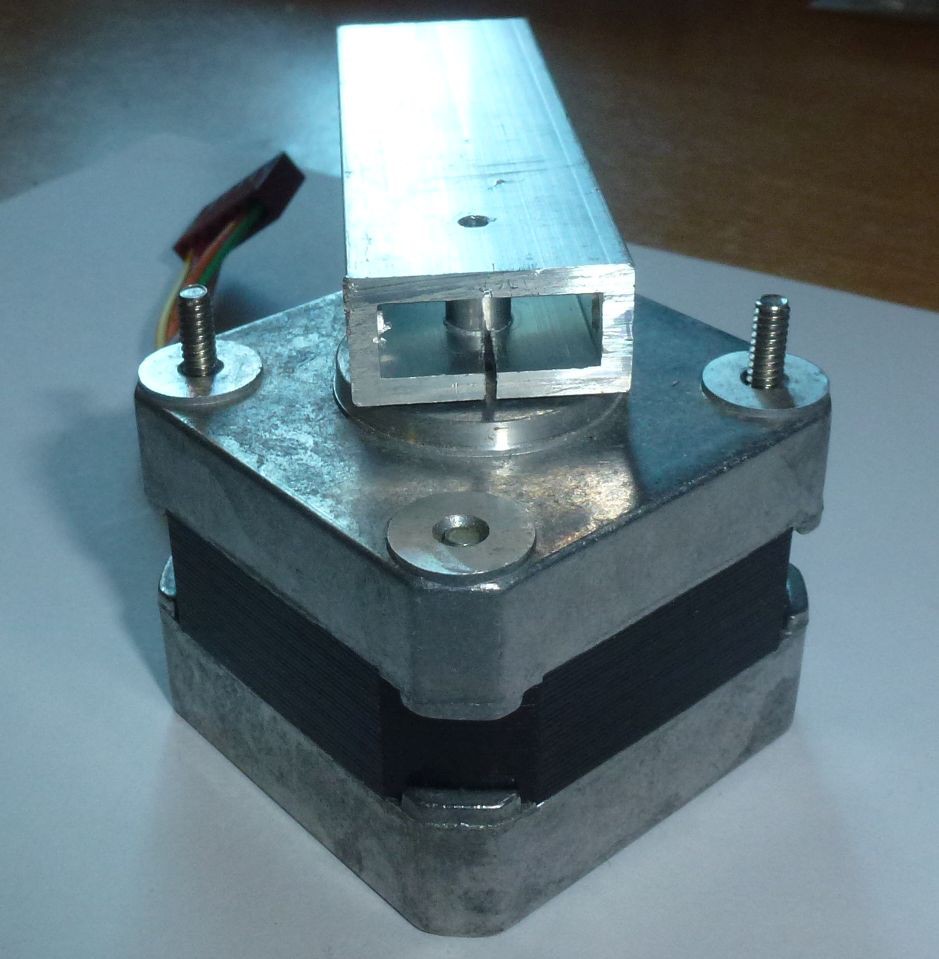
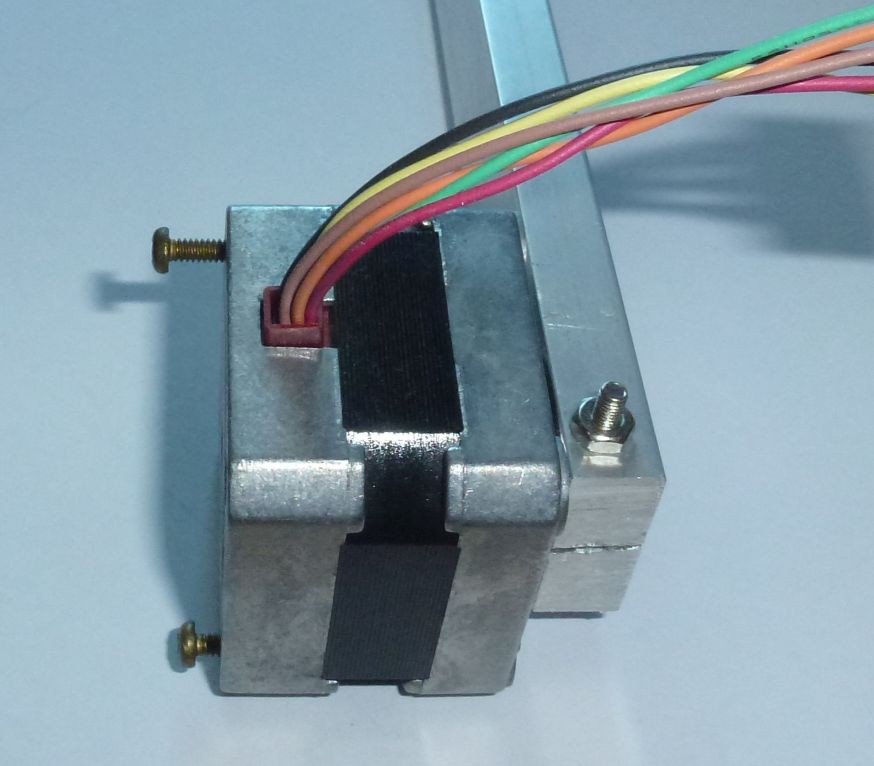
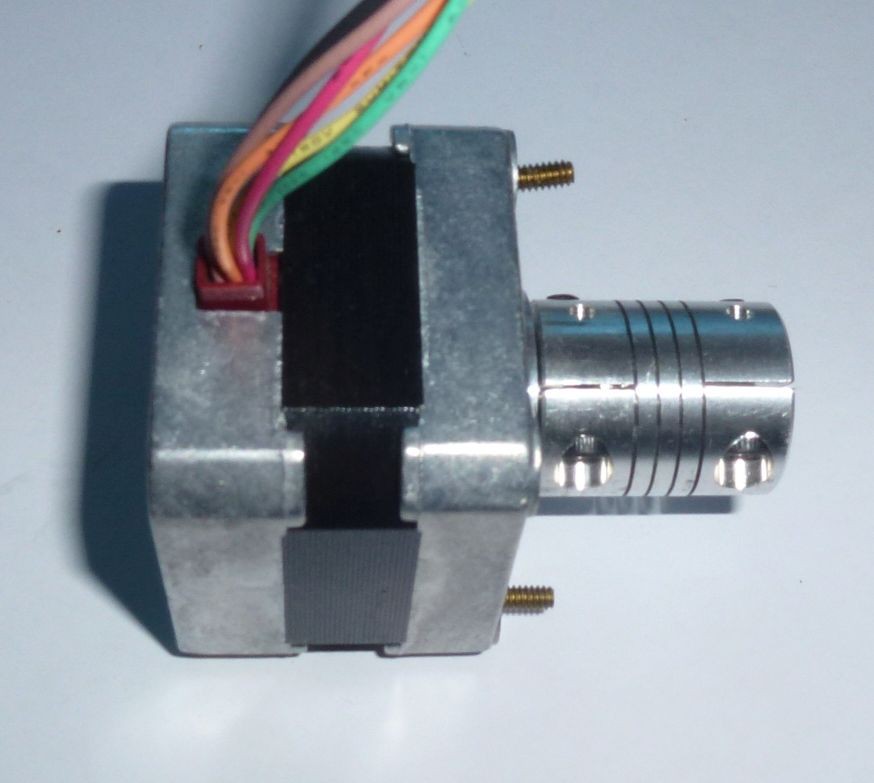
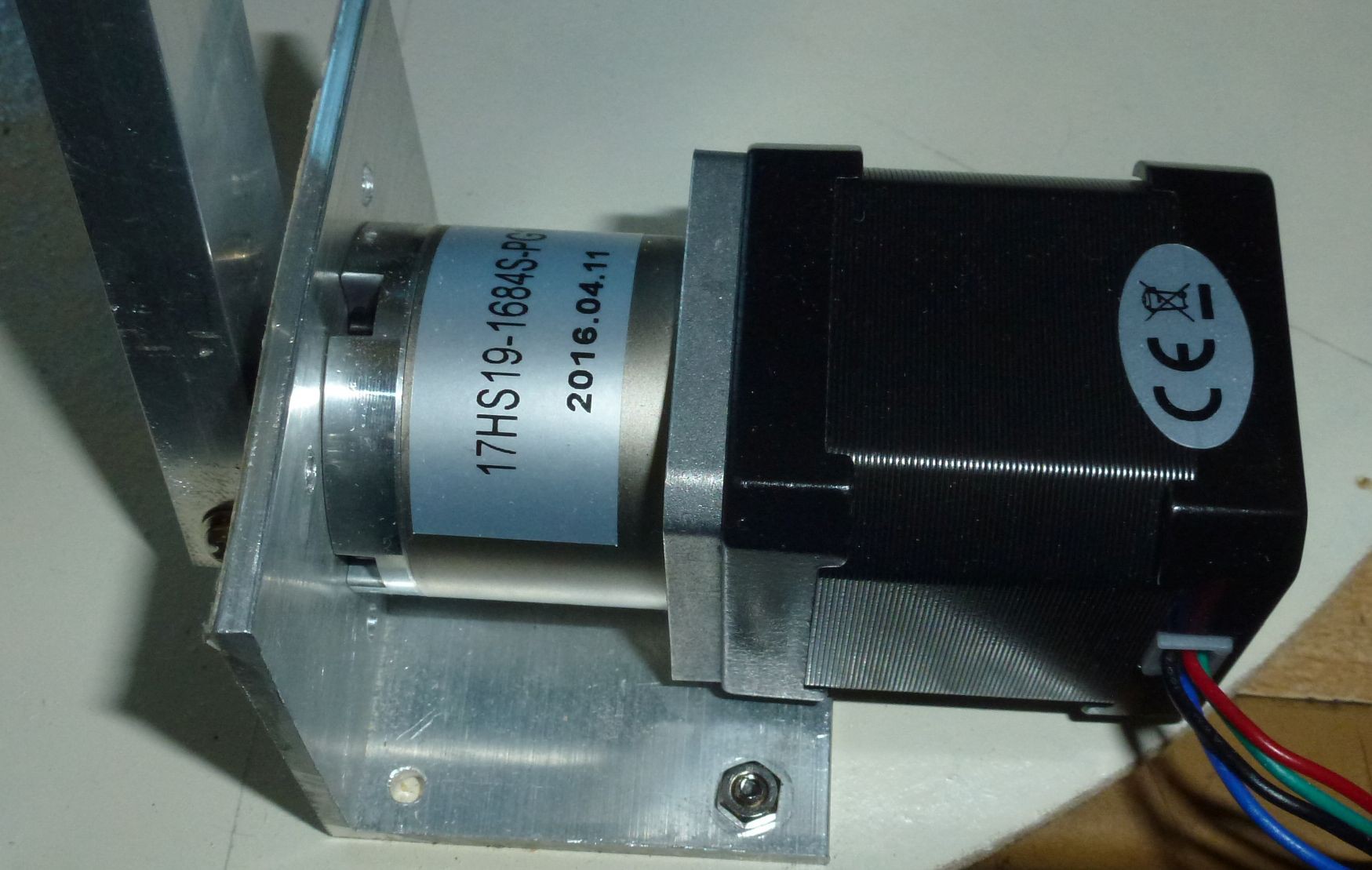
This alternative uses slightly more expensive steppers but uses no linear motion components, just cheap extruded aluminium instead.















 Will F.
Will F.


 Russell Munro
Russell Munro