 Hacker404
Hacker404Now that I decided on some steppers it's time to start putting the mechanics together.
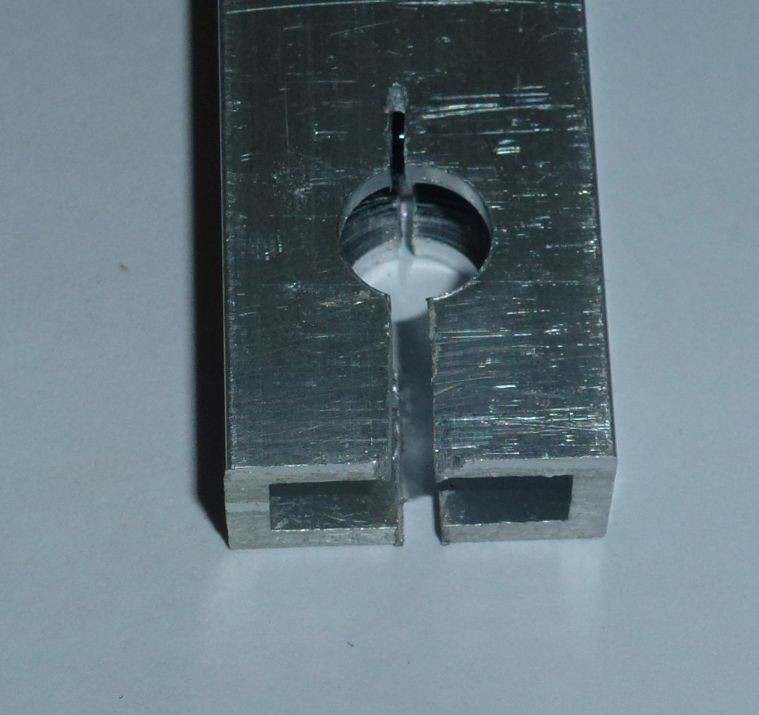
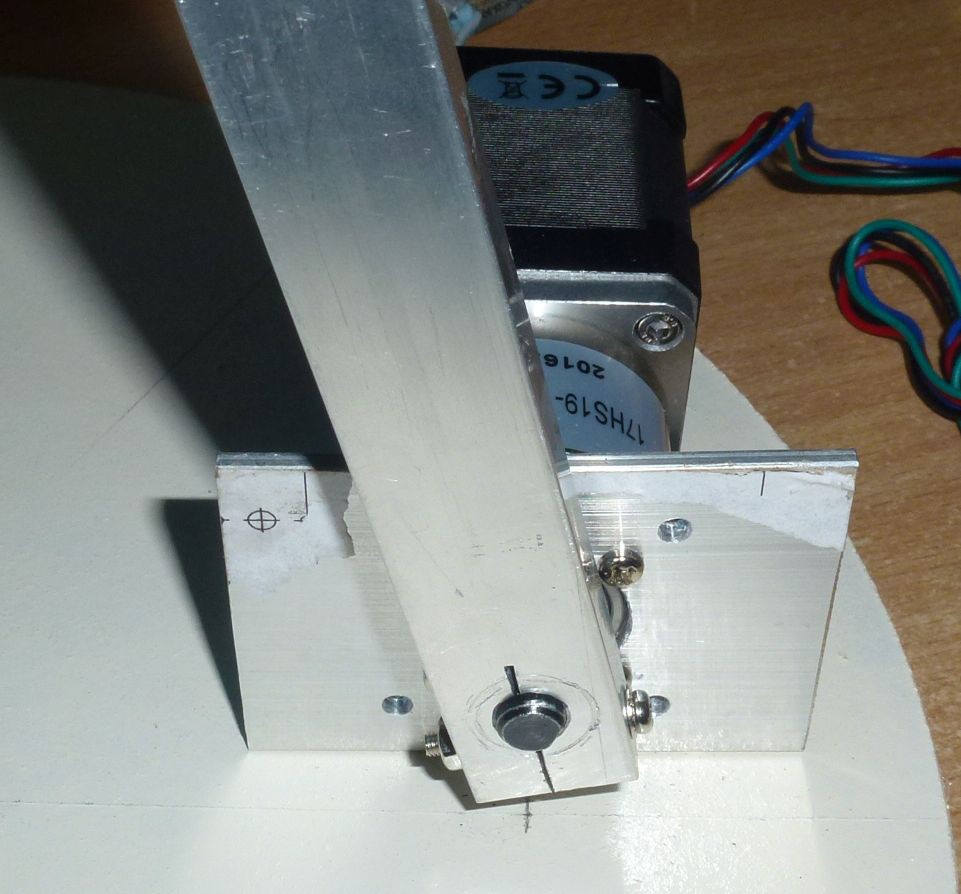
The arms (bicep) are 20x10mm hollow box section aluminium tubing 2mm thick with an 8mm hole at one end for the stepper shaft and a 5.5mm hole at the other end and M3 bolts for tensioning at either end -

The slots at the ends were made with a hacksaw but that didn't remove enough metal at the shaft end so I enlarged it with a abrasive cutting disk. I held the box section in a vice and was very careful as it was very 'grabby' -
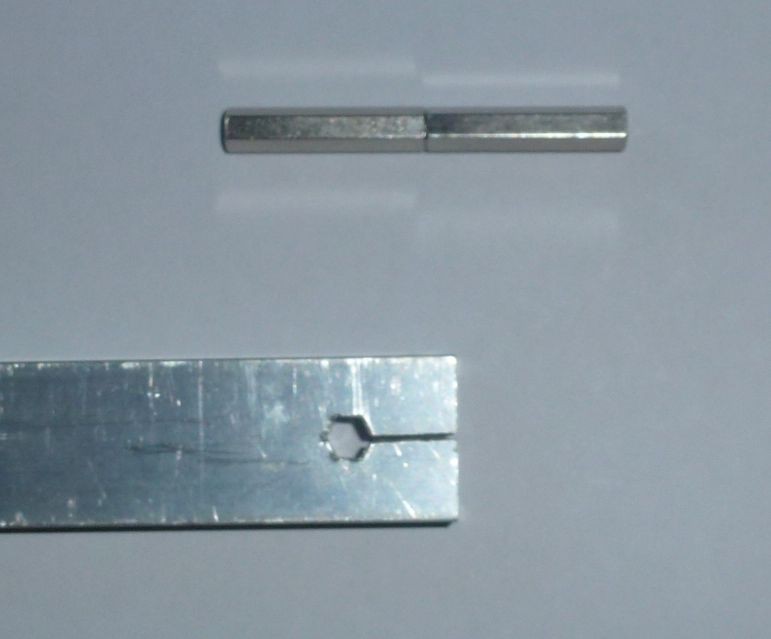
The other end is a bit more complex as it holds the separated linkages (forearms) so here's the sequence to making them by using hex standoffs and screws with the heads cut off -


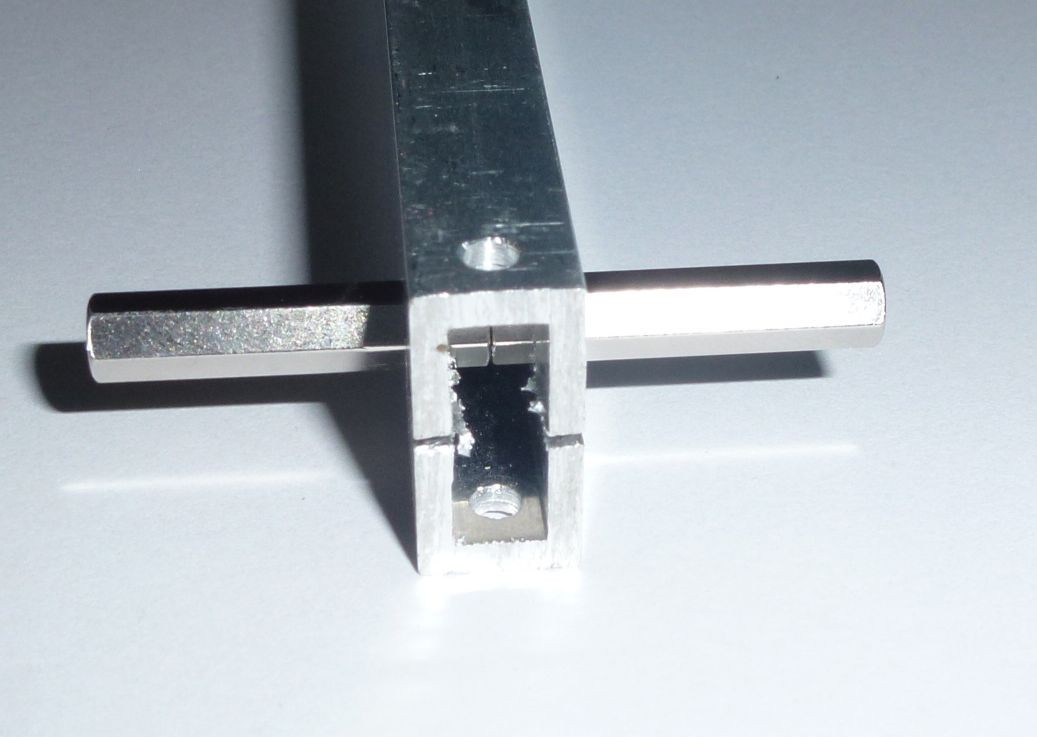
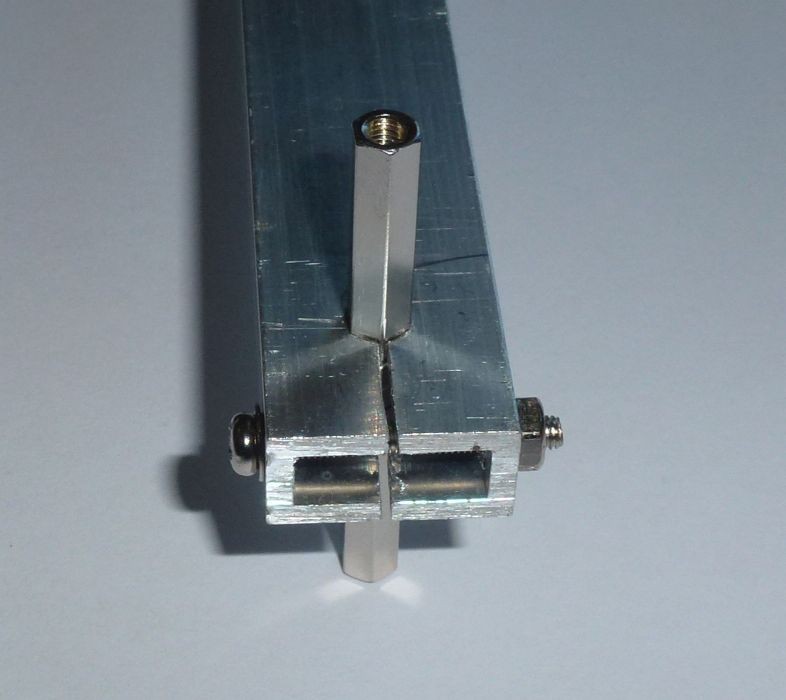
And one arm finished - rinse repeat -

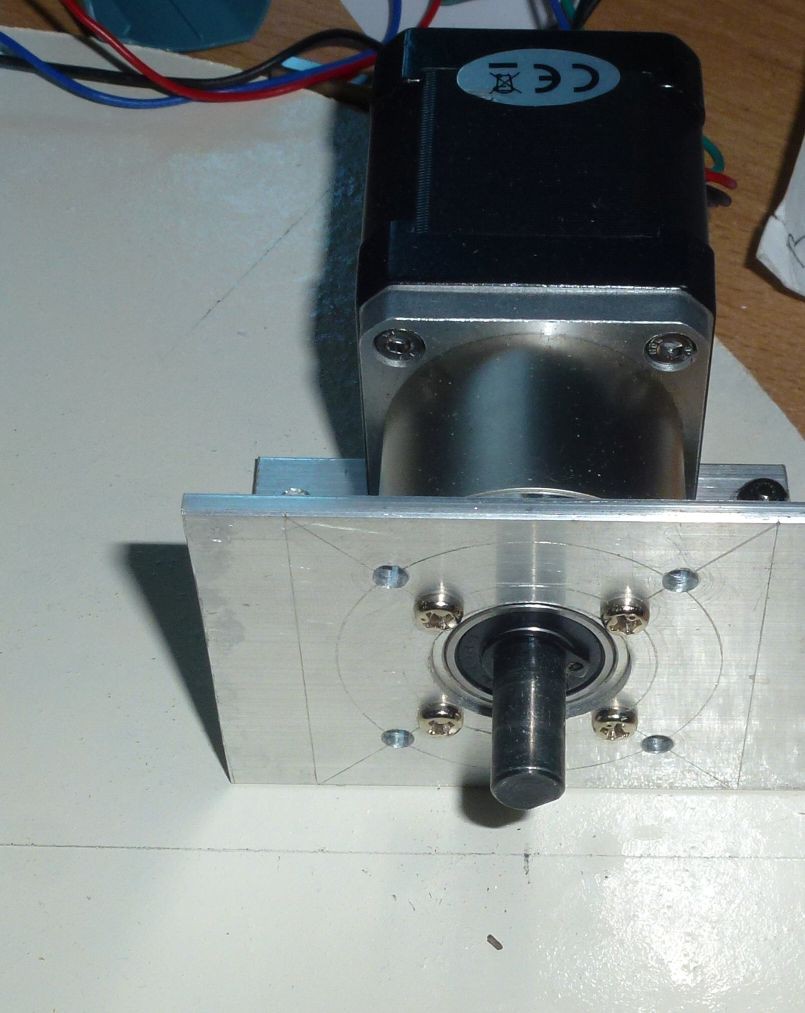
Ok, not the base and motors. I used a round piece of custom board that was left over from another project that I don't remember anything about except that it had round bits. It's too thin (3mm) and it flexes but it will do for now -

You can buy brackets if you want but they aren't hard to make.

Wait!! WTF was that (above) ??? Lets have another look -


Know what it is yet?

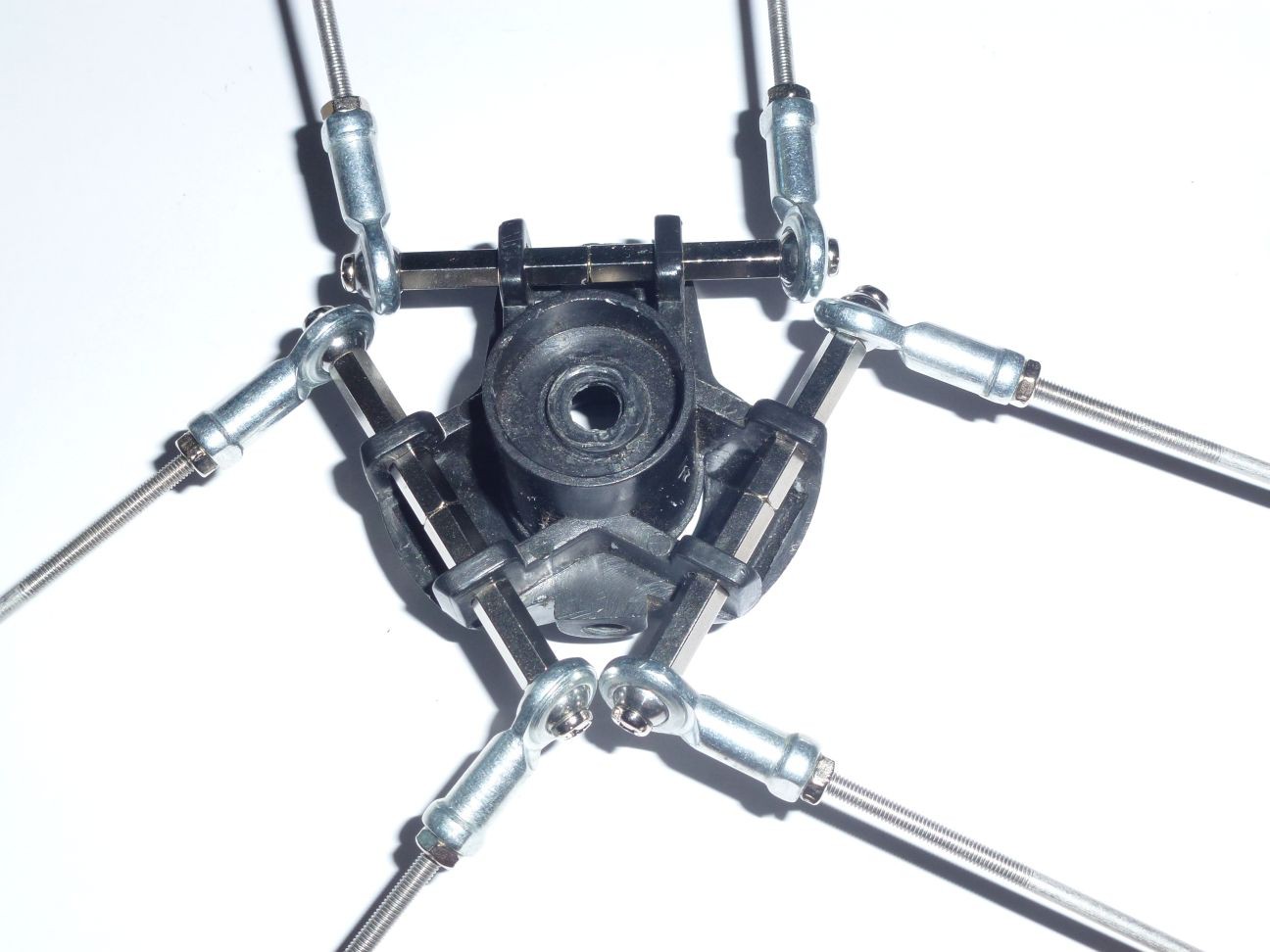
Well obviously it's the center hub to hold the end effector now but what was it previously?
It was the center hub from a camera tripod. You can pick up camera tripods for next to nothing in the charity stores because people loose the shoe for them.
OK. Now we prepare these -
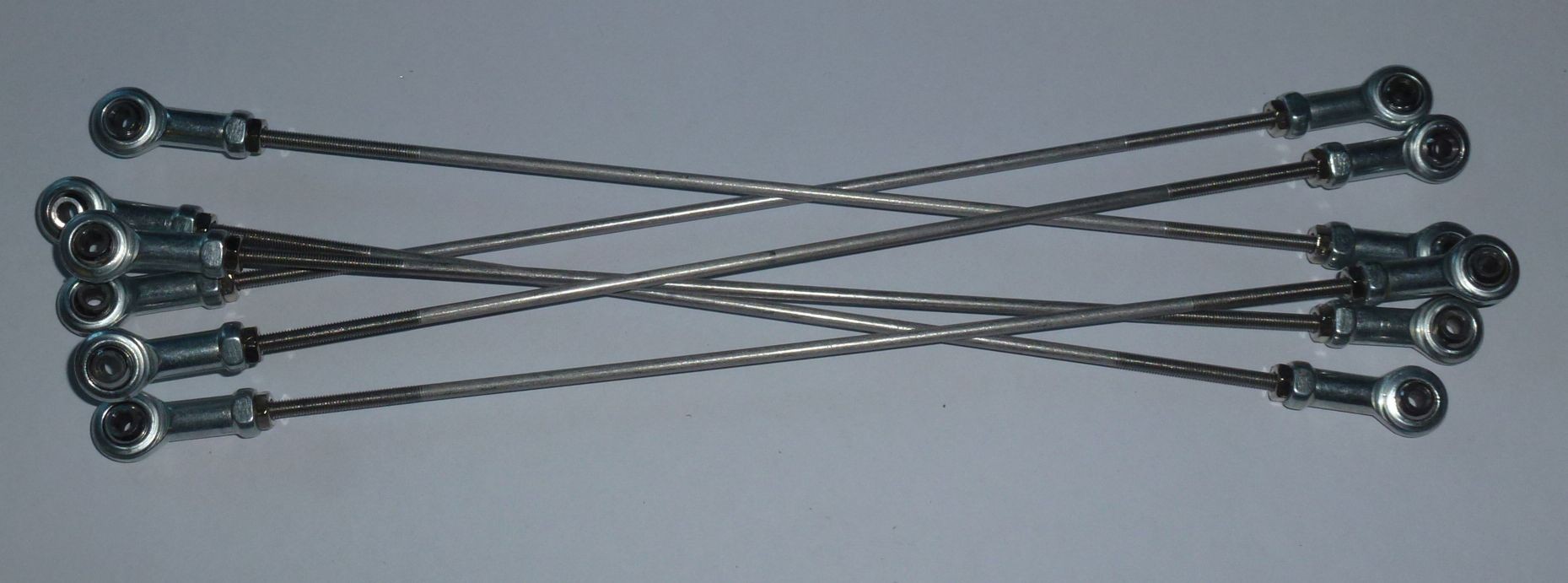
Just make them all the same length and use some lock nuts -

Now attache these ends -
And then these ends -

I noticed this to -

As stupid as this may sound there may be some advantage to inverting the forearms. I will 'do the math' and see if my suspicions are correct.
OK, now I have to work out how to do the limit switches.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I never did get those delta-printers, the hardest/most-expensive part is the linear-actuators, which could just as easily be used Cartesian.
Interesting solution, here. Great find with the tripod, and nice job with the mechanics!
Inverted looks to me like it'd be more stable if that's the orientation of the system (motors at the bottom).
Are you sure? yes | no