 Timescale
TimescaleThinking about it some more, it is obvious that there are 3 types of possible baseline operations here. It's the HID function, the defined point function and of course a combination of those two. I'd opt to go from simple to complex so I'll try the defined point function first.
For the inevitable presentation I make a simple plan which shows all the physical properties of all scenarios. It is a simple picture that is meant to focus on what is needed.
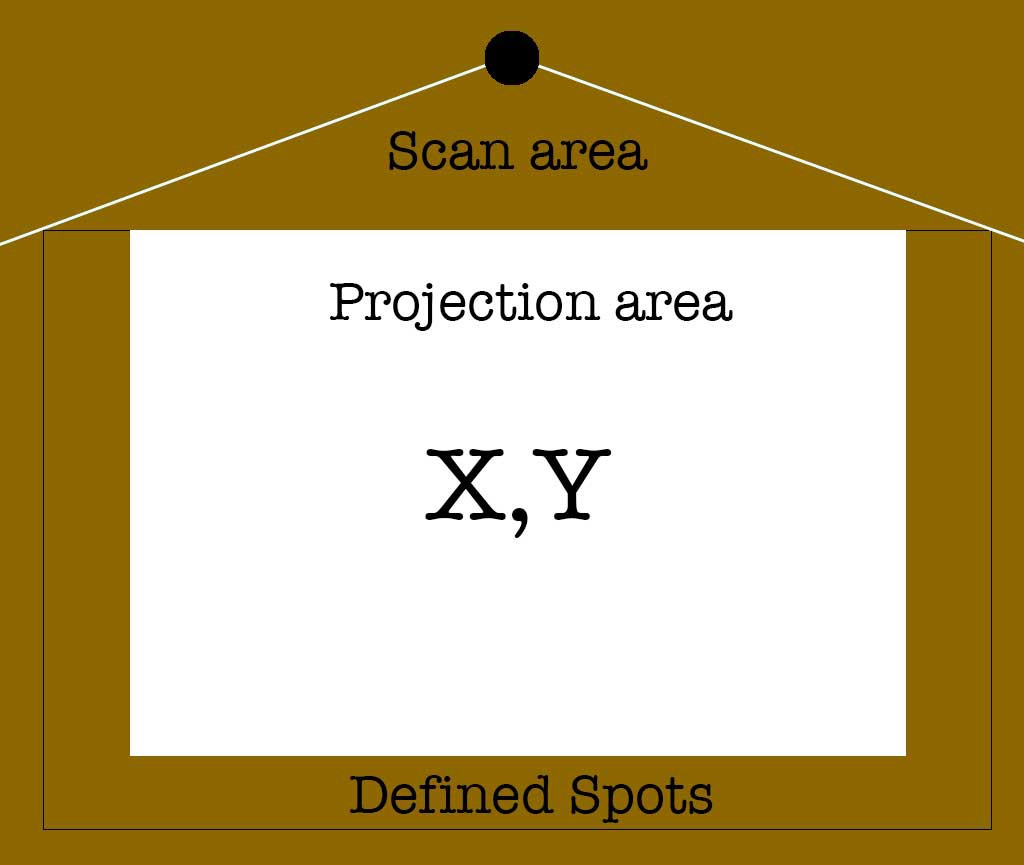
The scan area simple represents the area from which data is acquired. The projection area is of course the image which the interaction with the system is displayed on and this can be interacted with via screen coordinated, however it could also hold defined spots.
The outer boundary could also use coordinates, but most likely will use pre-defined locations that trigger the running application. Point is, these are different applications.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.