 Will Donaldson
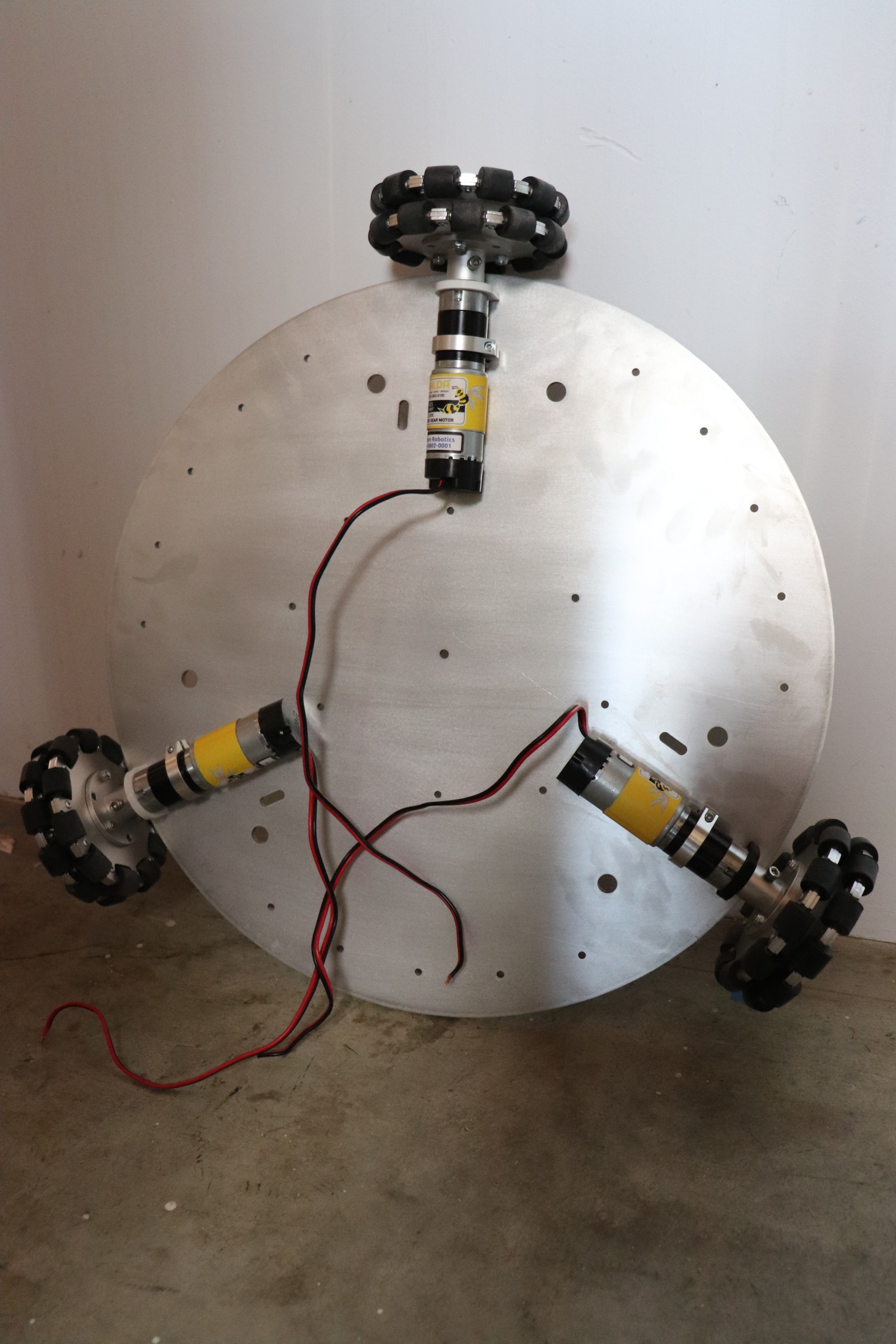
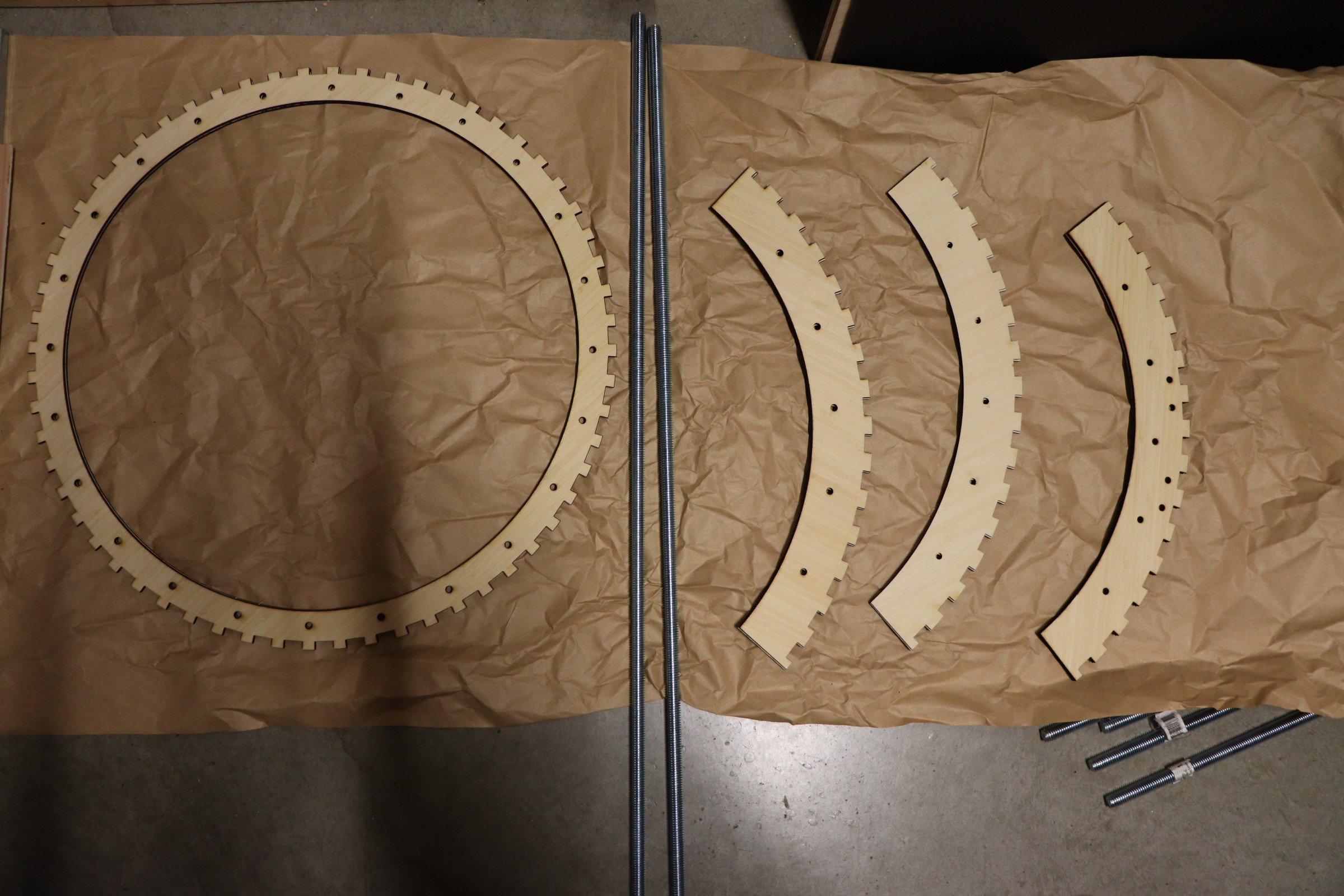
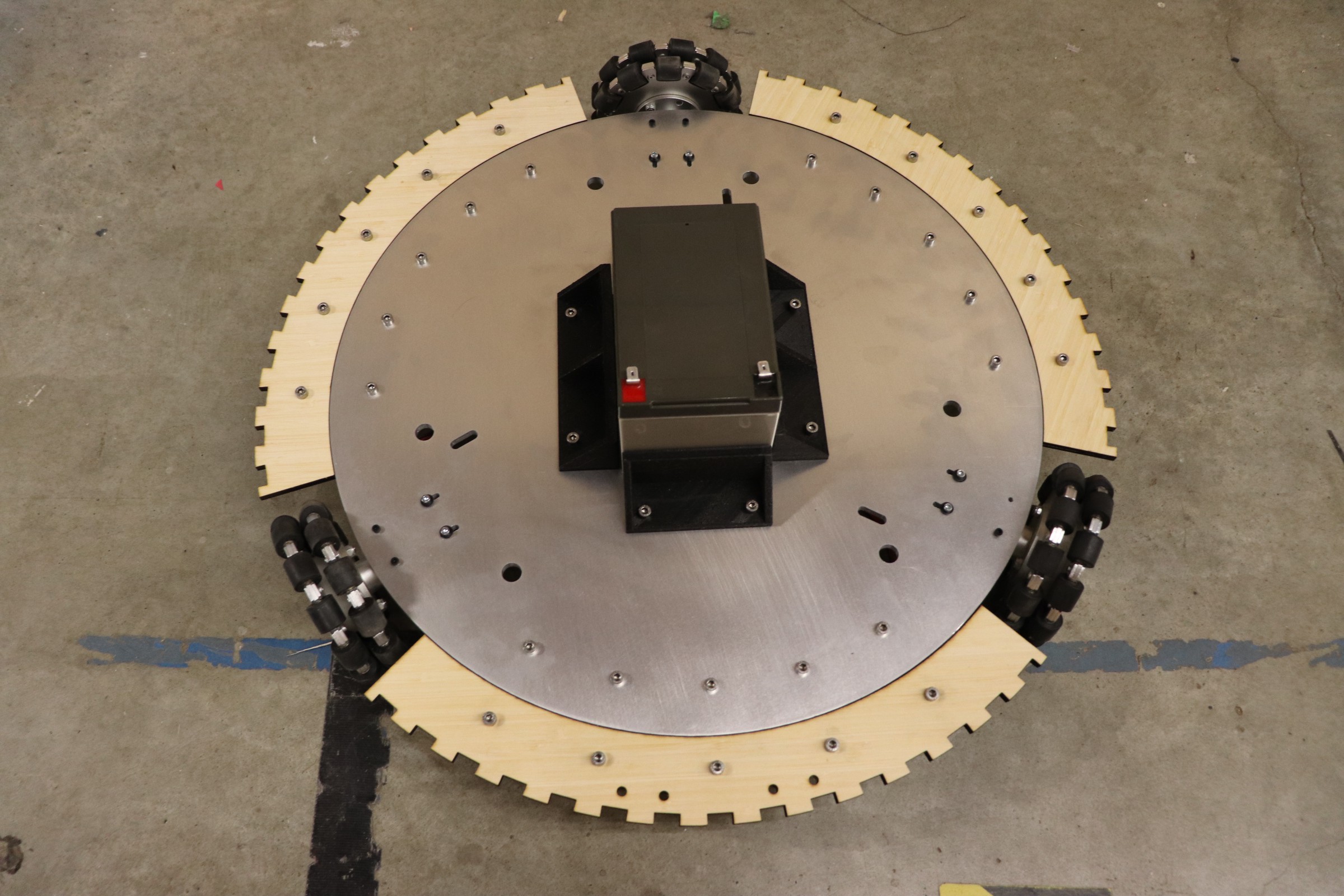
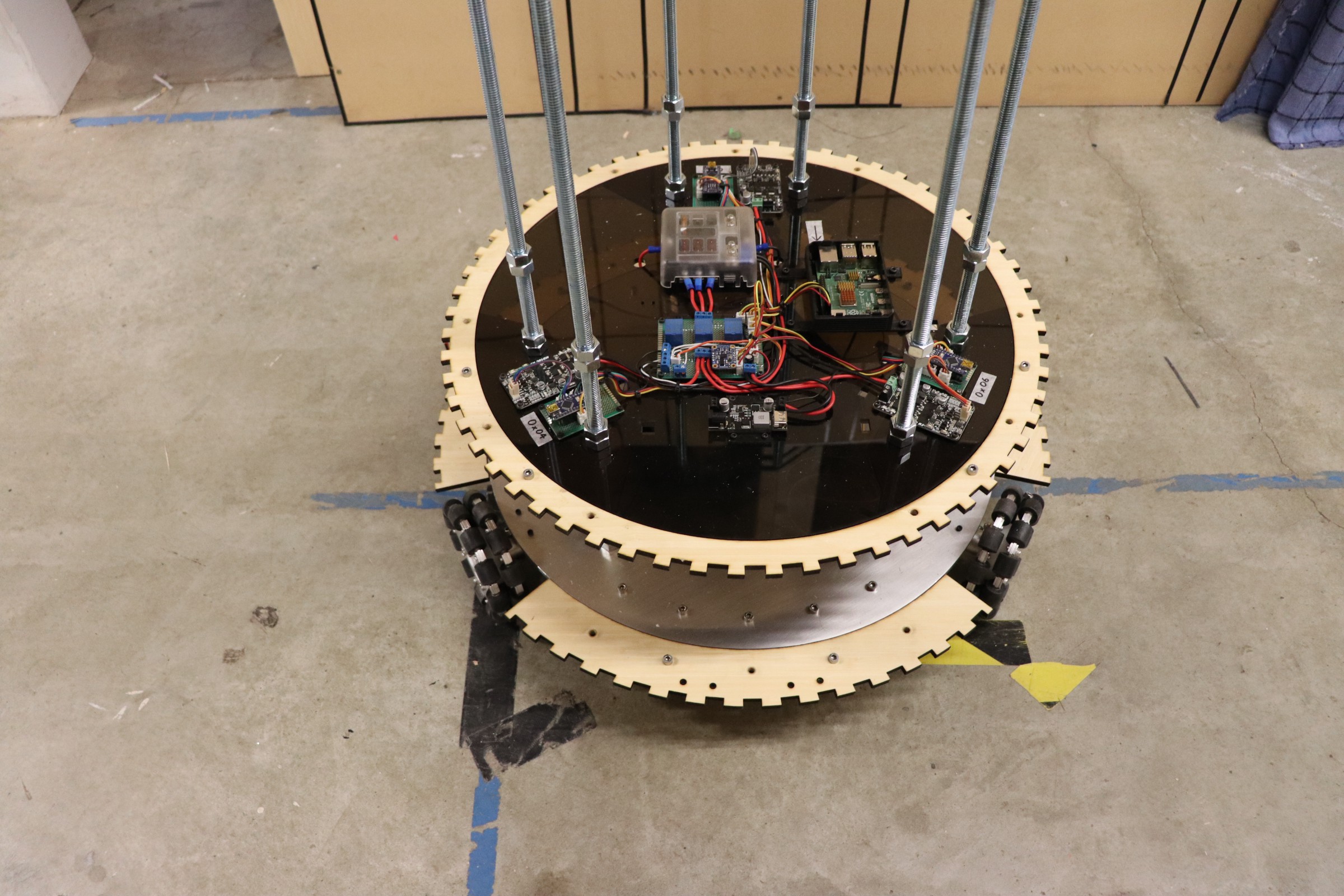
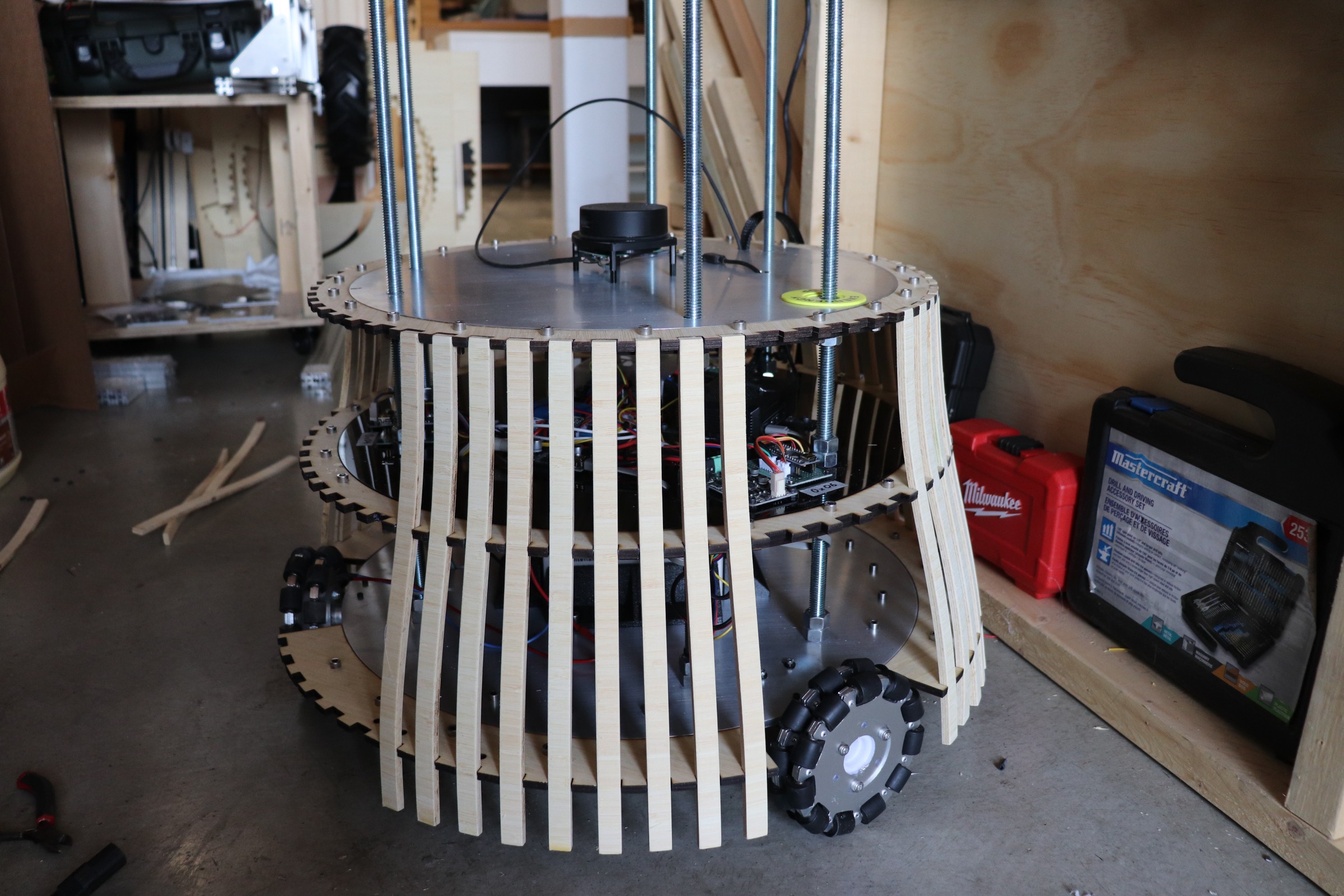
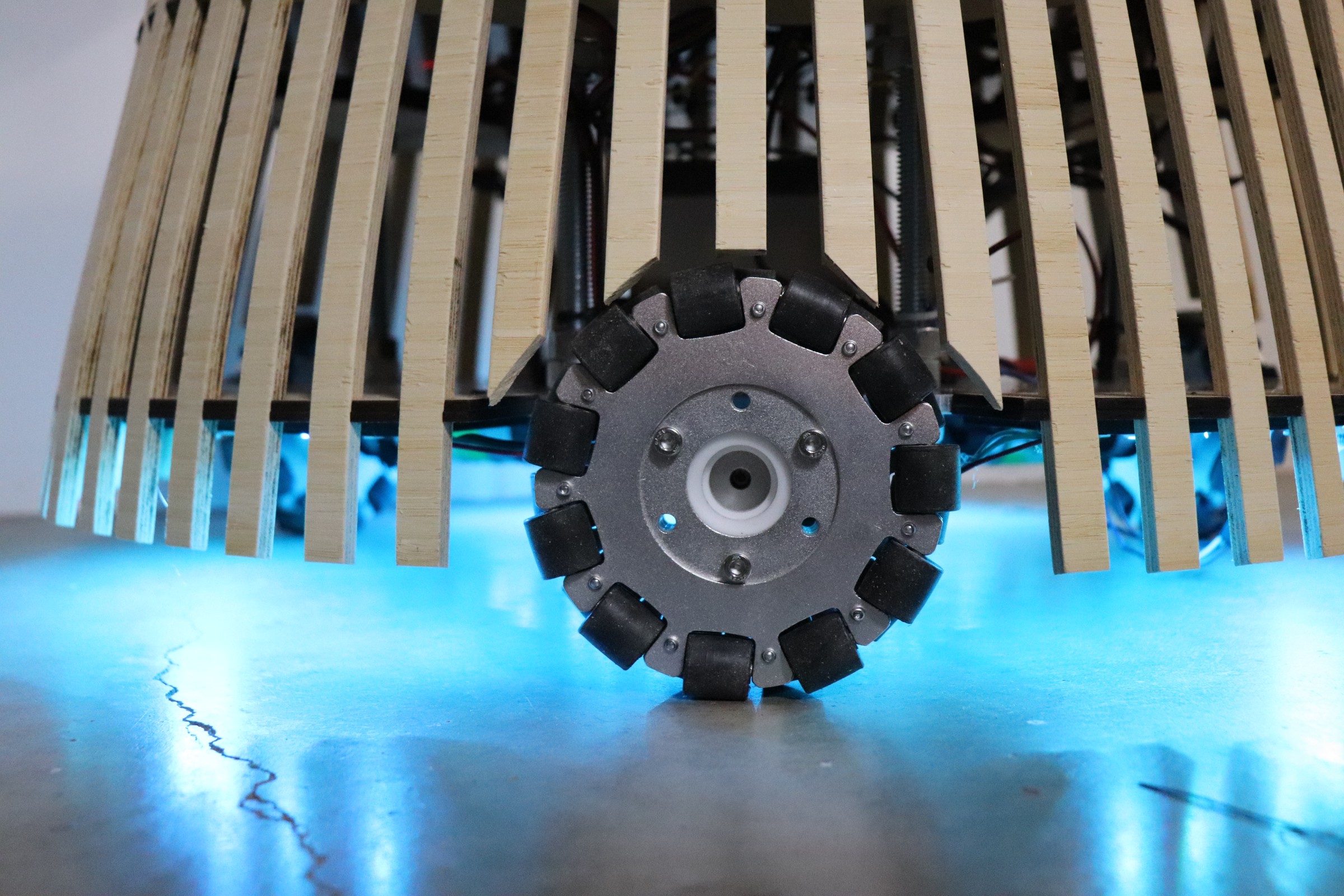
Will DonaldsonVersion 2 of the robot has largely the same layout however we focused on creating an aesthetically pleasing robot shell that is friendly and inspires curiosity. The blog details the build procedure however it is a labor-intensive design, for this reason, we designed the mounting mechanism such that the wooden shell can be removed by unscrewing the bolts and replacing it with a different shell (i.e. a different, mass-produced shell).

During our design process, we did create one design inspired by artist David C. Roy, however, due to the design complexity, we did not pursue it. Nonetheless, it is a design we would like to share in the video below. Unlike our static shell, this design would use an inner and outer shell spinning in opposite directions at a constant velocity creating an enchanting optical illusion.




Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.