 Will Donaldson
Will DonaldsonOMNi runs Ubuntu 20.04 with ROS2 Foxy Fitzroy. ROS2 is the second version of the Robotic Operating System, a benchmark platform for robotics in both academia and industry. The ROS2 architecture is to create a network of nodes with publisher/subscriber connections between the nodes.
There is a significant amount of information regarding ROS2 and this post cannot contain but a sliver, we will highlight some different features but for more information, we advise consulting the documentation.
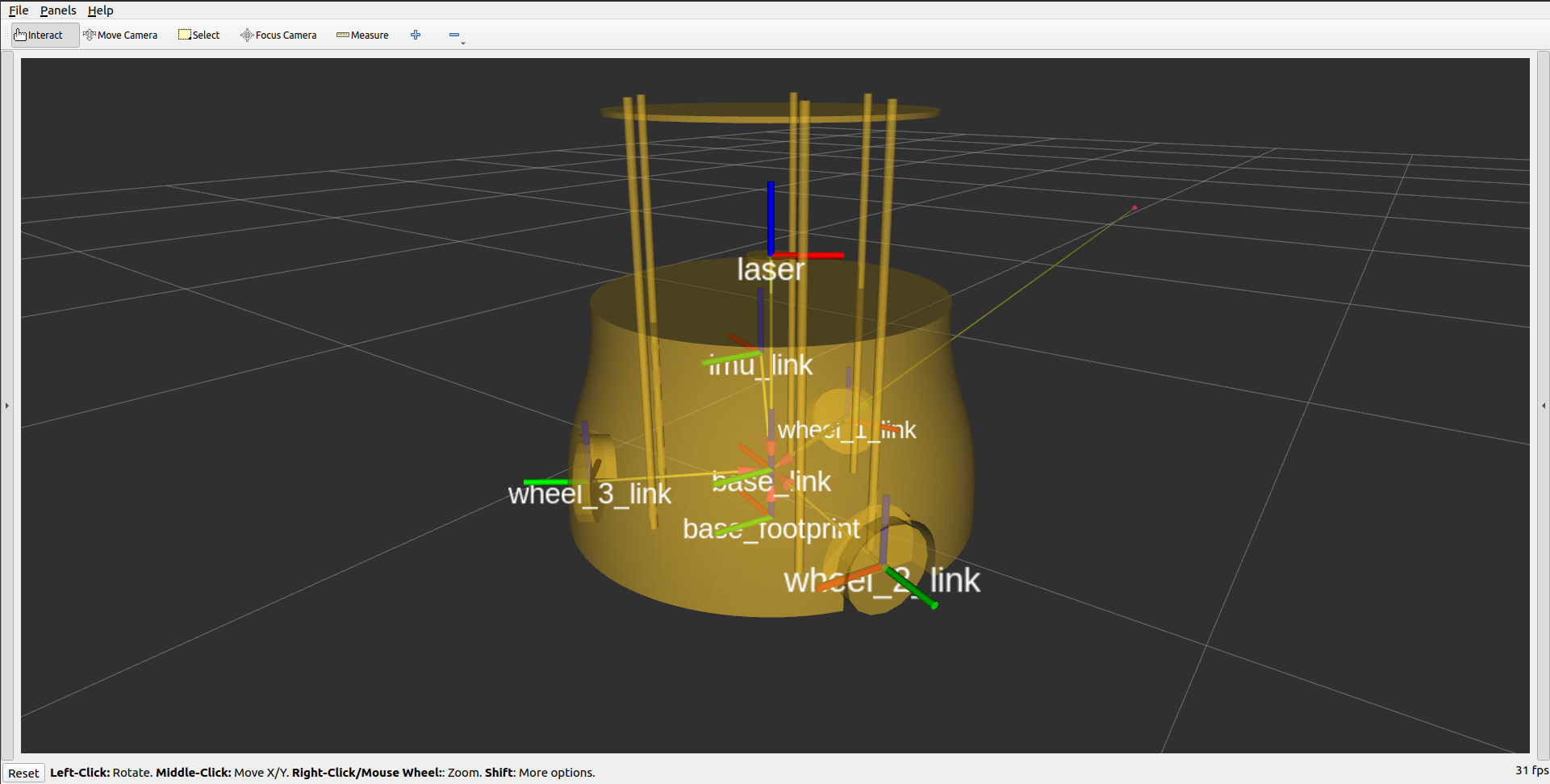
A useful tool while developing this project has been to use rviz2 (a visualization tool for ROS2). Below is a screenshot of rviz showing a low poly model of the robot along with the transformation tree between the different frames. The below picture shows the /robot_description and /tf topics that are responsible for the graphical display of the robot and coordinate transformations, respectively.
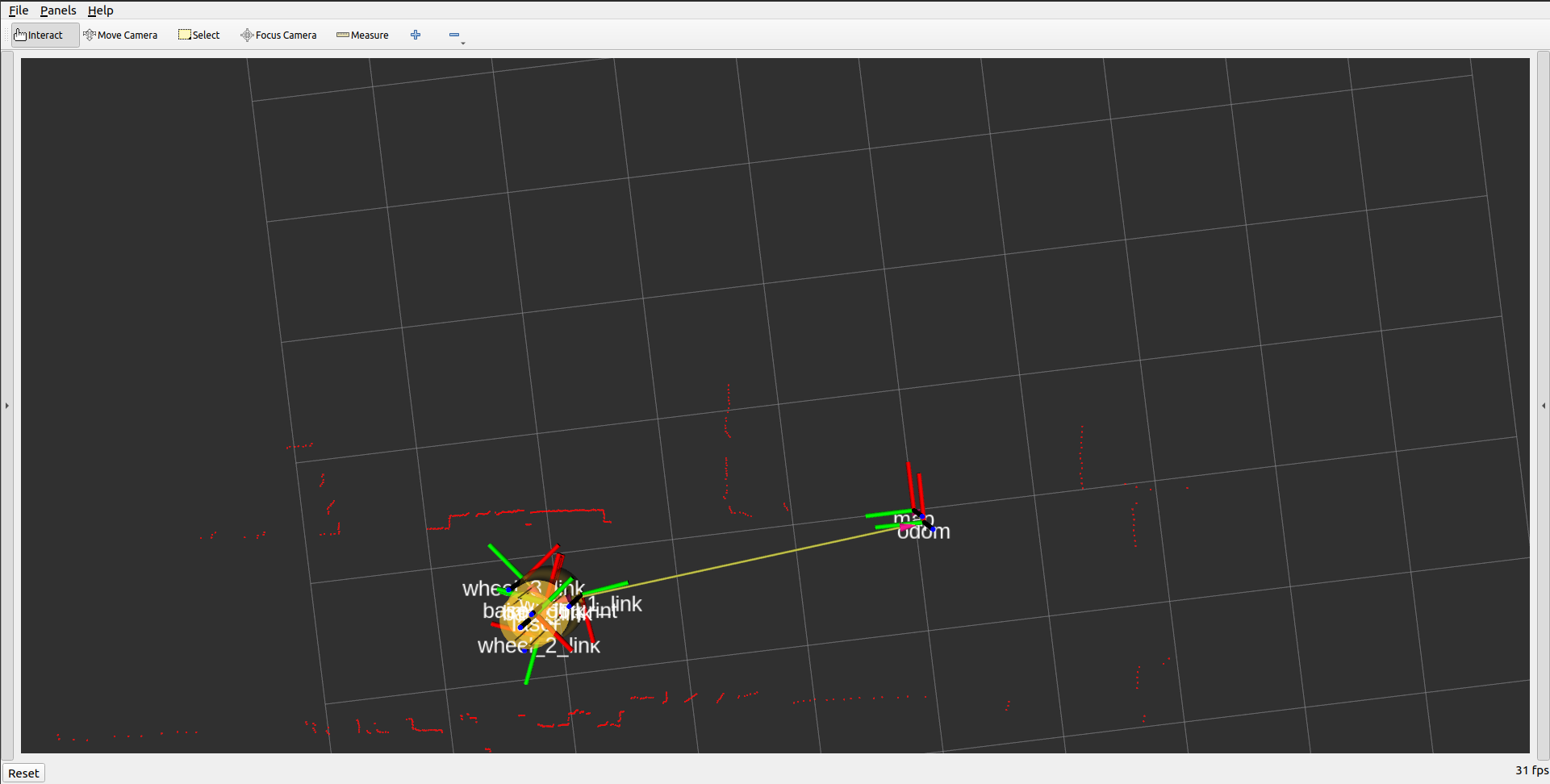
To demonstrate the powerful node structure we can add in a new topic, /scan, which displays a live view of the LiDAR scan. Every red dot in the picture below is a place that the laser has hit an object (such as a wall) and reflected back to the sensor. You can also see the map and odom transformations to the left of the robot, representing the map origin and the robot's initial location, respectively (assuming perfect tracking these two transformations would be in the exact same location).
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.