 Will Donaldson
Will DonaldsonFor our specific application, a robot for interacting with physical displays in a museum, a robotic arm is crucial. But beyond our niche application, having a modular robotic arm enables numerous possibilities for OMNi as an open-source platform. For example, a robot with an arm could act as a companion and caregiver in aged care facilities, automate mundane tasks in industry, and even act as a robotic waiter in specialized restaurants.
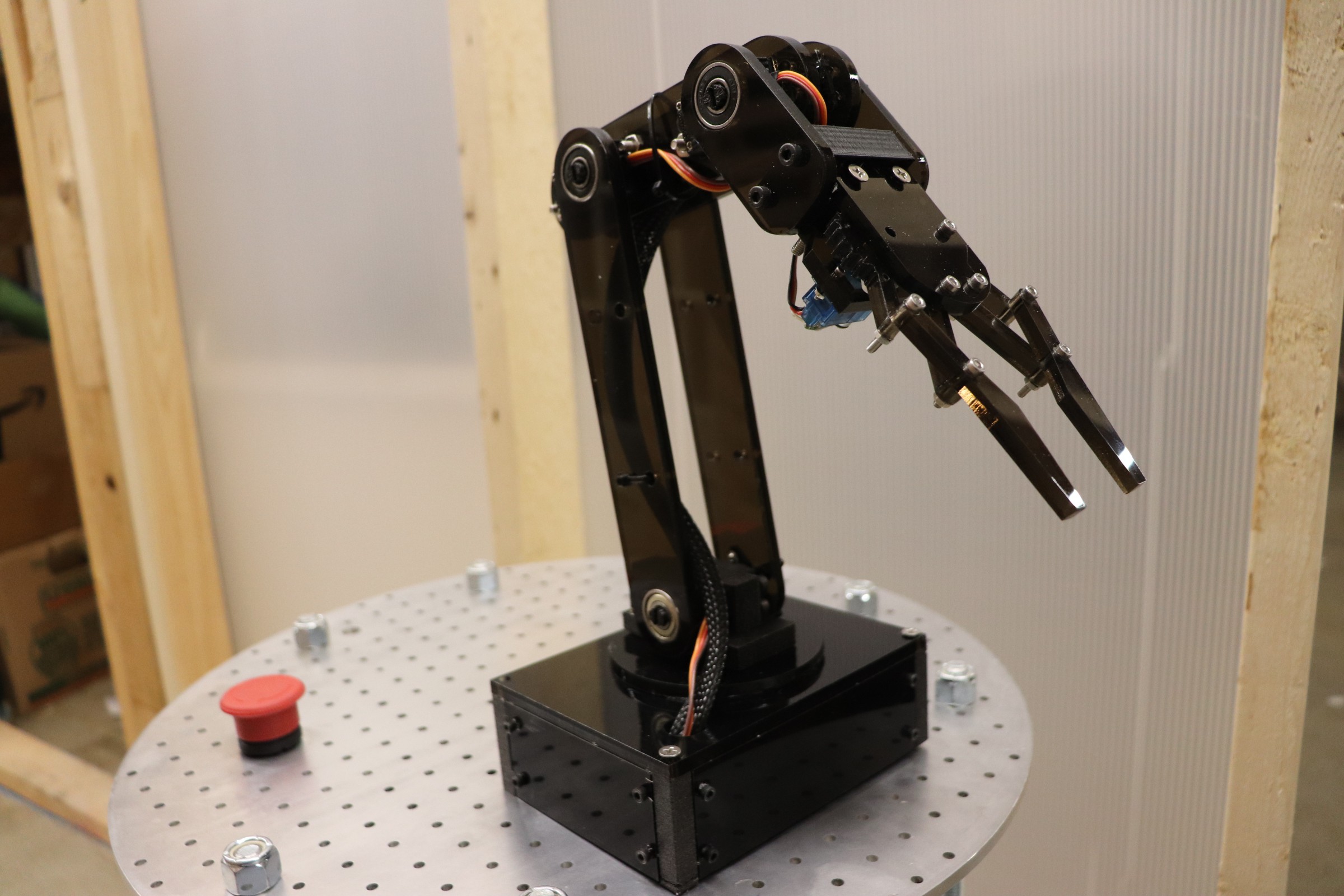
The current robotic arm uses four MG996R servos for the arm and one SG90 servo for the end effector. Long term we plan to either develop a new, more robust, and capable arm with force sensors to provide haptic feedback to operators or look at implementing a compatible open-source arm that already exists. Modularity is very important to our design and we want OMNi to work with other open-source projects, actuators, and sensors.
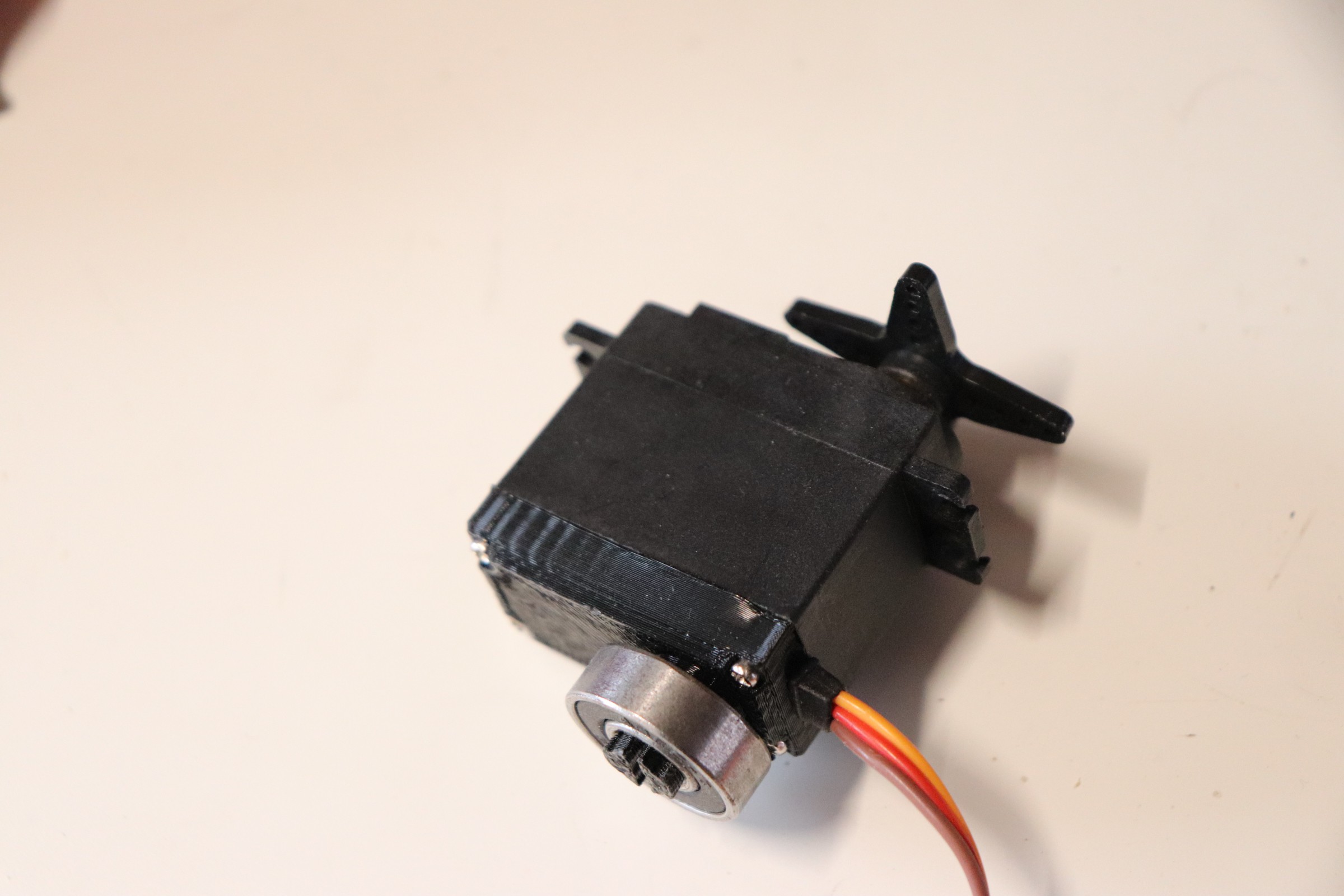
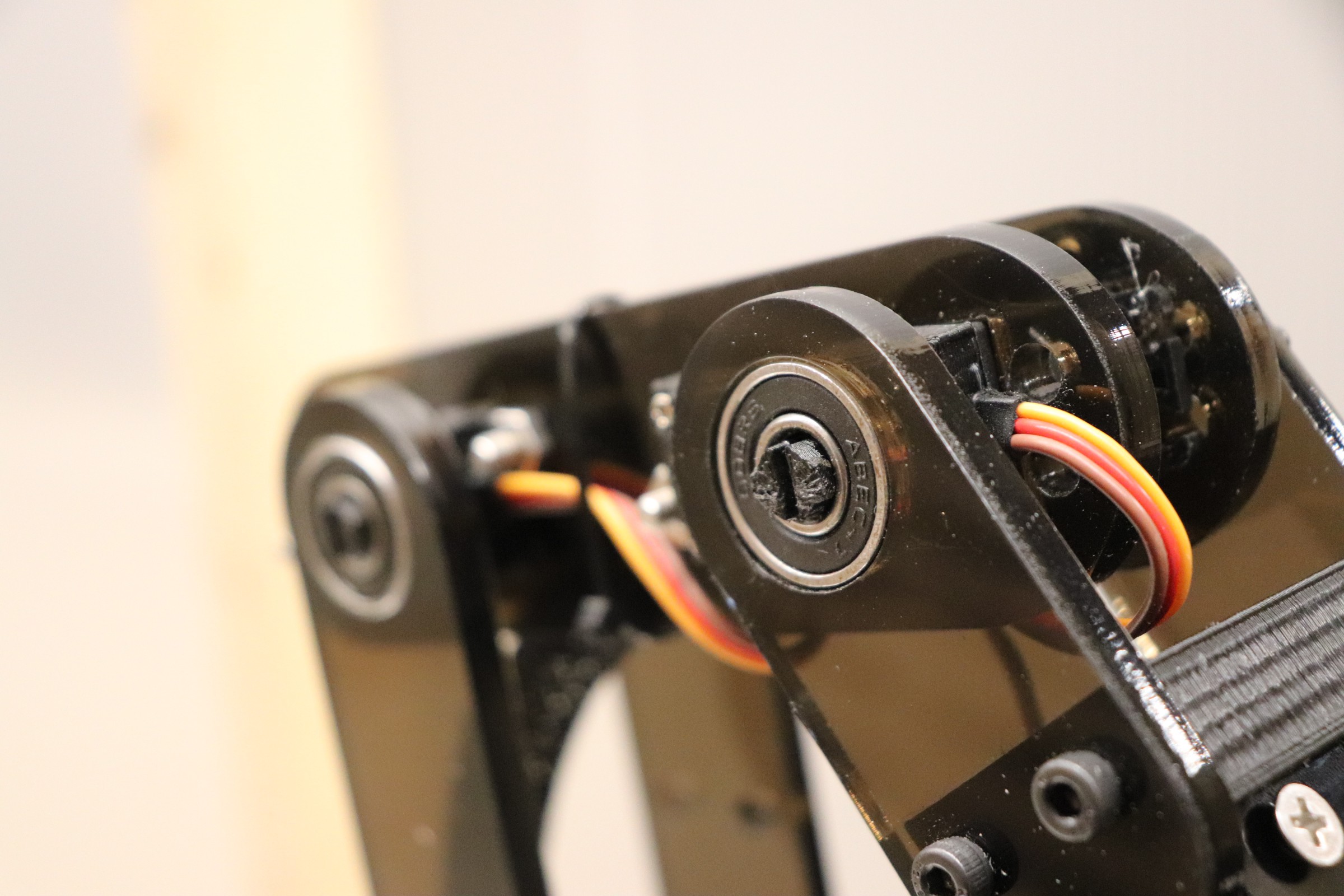
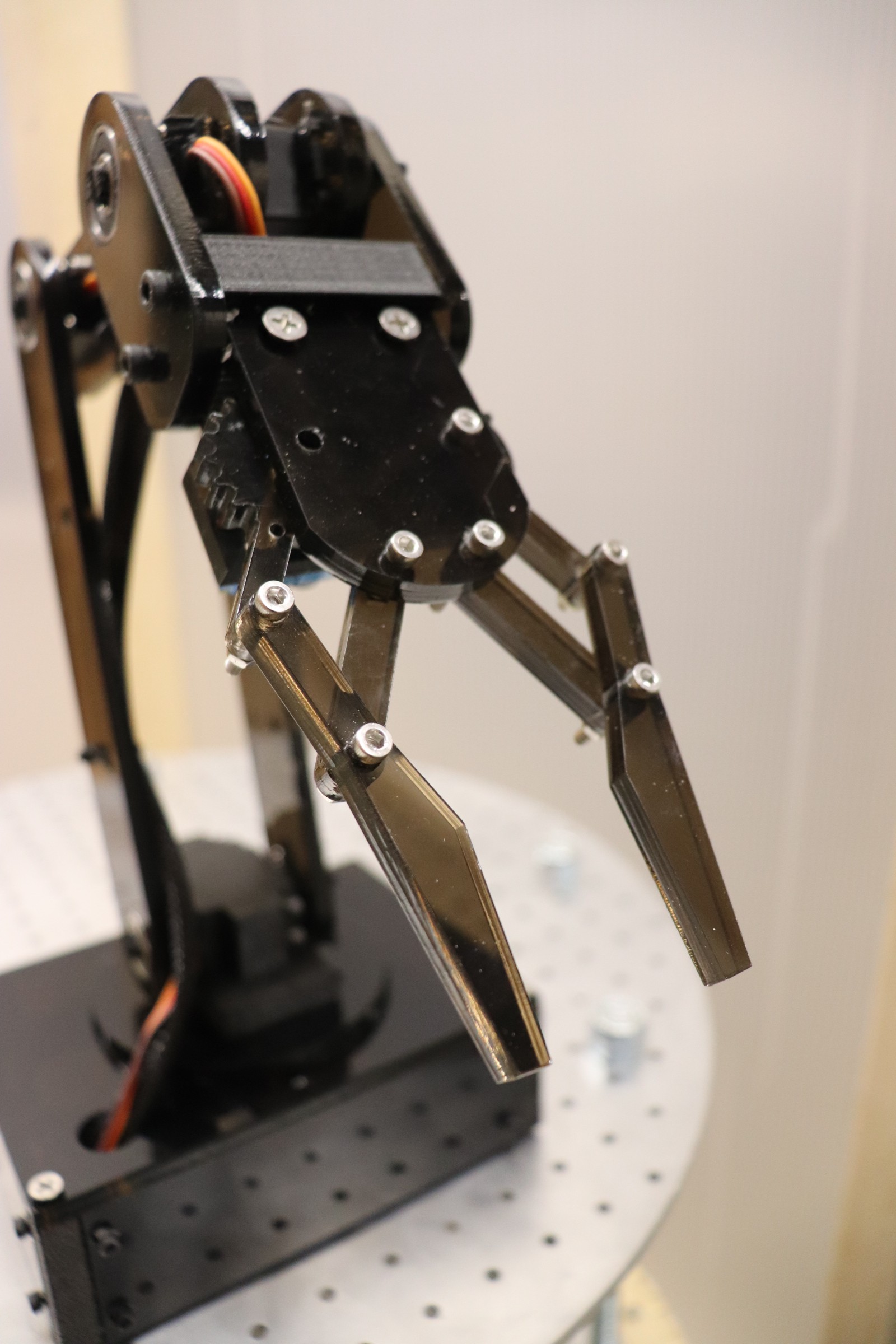
Below are several pictures of the current arm. It is fabricated from laser-cut acrylic and 3D-printed brackets. One novel feature of the design is a custom printed frame for the servo that allows a bearing to be connected providing support on the opposite side of the servo to the output shaft. This design was adopted from a previous robotic snake project.
While the arm is a good proof of concept prototype, there are several constraints that prevent it from being a useful tool including, a low load capacity, no feedback sensors, and low positional repeatability. Furthermore, we would like to develop an arm with interchangeable end effectors such as a gripper, stylus, and RFID tag.
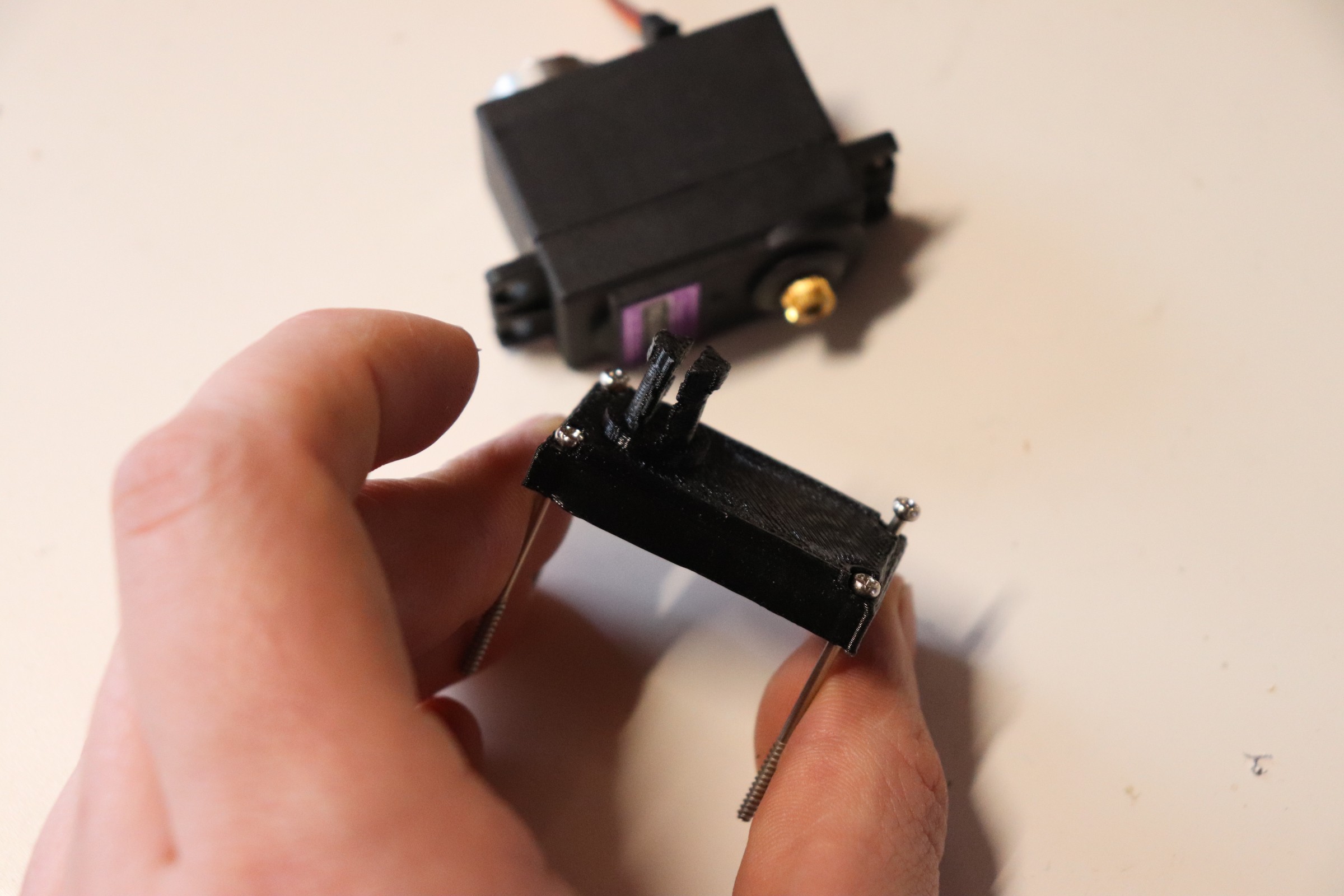
While the arm is a good proof of concept prototype, there are several constraints that prevent it from being a useful tool including, a low load capacity, no feedback sensors, and low positional repeatability. Furthermore, we would like to develop an arm with interchangeable end effectors such as a gripper, stylus, and RFID tag.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.