 Joao Buzzatto
Joao Buzzatto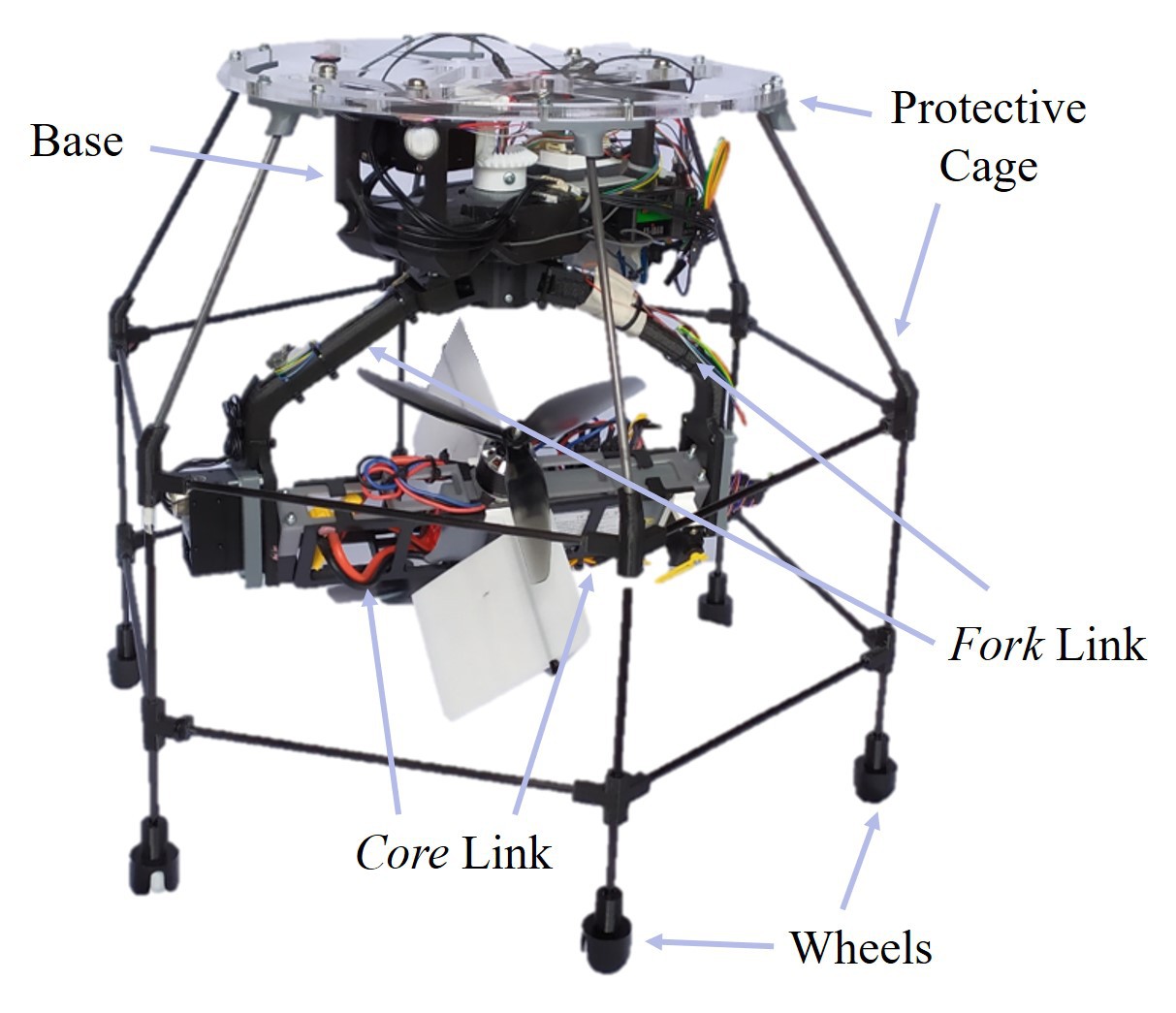
With the proposed rotor-on-gimbal design, the system's increased capability leads to a variety of applications. Given the ability to apply thrust in any direction without being limited by the base mount's orientation, one possible application is to place this modular rotor concept on a structure with wheels. The result is a vehicle able to roll on the ground and fly, acting both as a ground robot and an Unmanned Aerial Vehicle (UAV).
With the flexibility of the omnidirectional thrust vectoring, the system can easily overcome obstacles by taking-off the ground. Furthermore, having the base mount attached above the rotor module, i. e., in an upside-down manner, brings the center of gravity of the system closer to the ground. This reduces the torque the rotor's thrust generates when the wheels are in contact with the ground, making it stable for operation as an Unmanned Ground Vehicle (AGV). Carbon fibre rods form a hexagon structure connected with 3D-printed PLA connectors. The use of carbon fiber rods ensures that the frame will have adequate strength without a significant increase in the overall weight of the UAV. This structure is connected to a laser-cut acrylics sheet mount, where the rotor module base is attached. The carbon fibre structure is fitted with a lightweight (7 g) injected-molded, Pololu ball caster with 3/4 inches Plastic Ball. With electronics and propellers inside the cage-like structure, the impact of collision incurred damages to the UAV, is minimized.
Demonstration Video 1: https://www.youtube.com/watch?v=1dOp-dNc0_U
Demonstration Video 2: https://www.youtube.com/watch?v=JN7Ji_fr_0w
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.